开链机构自由度及末杆自由度
书籍:现代综合机械设计手册中
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1807页(1111字)
开链机构的自由度Fo等于所含各个运动副自由度f的总和,设机构中含有1、2、3、4、5类运动副的个数分别为p1、p2、p3、p4、p5,则开链机构自由度公式为:

开链机构示例见表5.1-4,其中的末杆自由度λ,是指末杆在机架坐标系中可能发生的独立的基本运动数,末杆是开链机构中离机架最“远”的构件,只有1个运动副。末杆自由度不可能多于开链各运动副自由度之和,且最多等于一刚体在三维空间的自由度,即λ≤Σf,且λ≤6,一般可用直观分析法按照下式确定λ值:
表5.1-4 开链机构自由度F0及末杆自由度λ示例
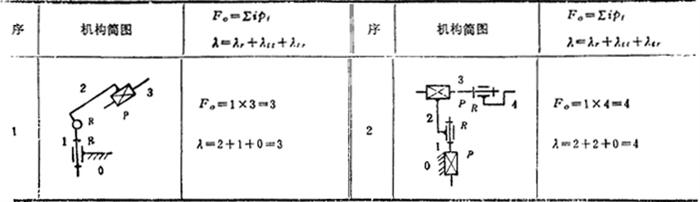

λ=λr+λt=λr+λtt+λtr (5.1-2)
式中λr为末杆转动数;λt为末杆移动数。λt又分为固有移动数λtt和衍生附加移动数λtr。λr、λt、λtt、λtr均最小为0,最大为3。λr、λtt、λt,的直观判定如下:
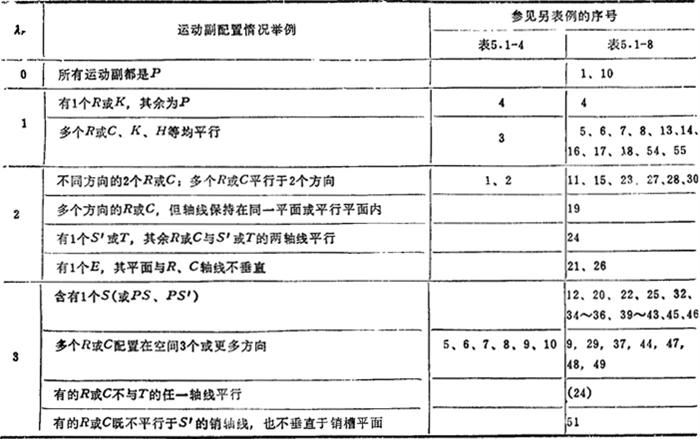
①末杆转动数λr,由开链中的转动副R、圆柱副C、球副S、滑滚副K、螺旋副H……的转动自由度提供。使λr等于0、1、2、3的若干运动副配置情况举例见表5.1-5。
表5.1-5 末杆转动数λr
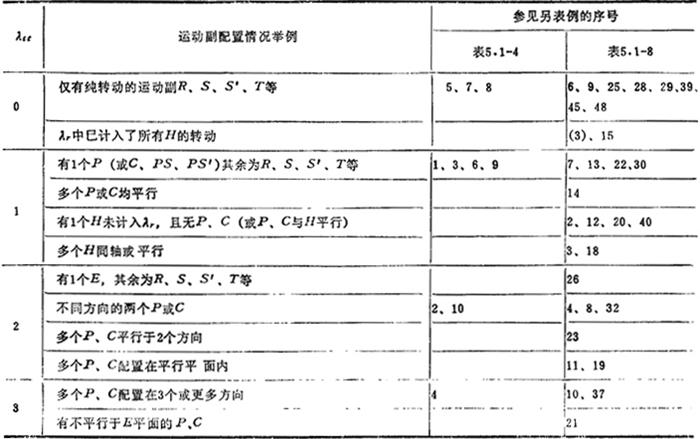
②末杆的固有移动数λtt,由开链中的移动副P、圆柱副C、滑滚副K、螺旋副H……的移动自由度直接产生。若λr中已计入H的转动,则λtt中不再计入移动;反之亦然。使λtt等于0、1、2,3的若干运动副配置情况举例见表5.1-6。
表5.1-6 末杆固有移动数λtt
③末杆的衍生附加移动数 由开链中的R、C、S、S′、K、H等的转动所衍生且与固有移动不重复的(附加)移动数。λtr与λtt之和不大于3。使λtr等于0、1、2、3的若干运动副配置情况举例见表5.1-7。
由开链中的R、C、S、S′、K、H等的转动所衍生且与固有移动不重复的(附加)移动数。λtr与λtt之和不大于3。使λtr等于0、1、2、3的若干运动副配置情况举例见表5.1-7。
表5.1-7 末杆衍生附加移动数λtt

上一篇:常用术语
下一篇:现代综合机械设计手册中目录