直线机构
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1836页(1514字)
4.1.1 精确直线机构
例5.2-50 锯床进给直线机构
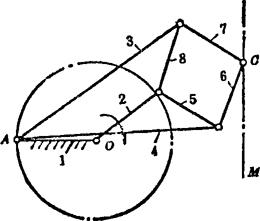
机构中各杆长度应满足的条件为:L1=L2;L3=L4;L5=L6=L7=L8。当杆2作主动件带动机构运动时,铰链C点的轨迹为垂直AO的一条直线CM,成为直线导向机构,用来实现锯床的进给运动。
例5.2-51 曲柄滑块的连杆直线机构

机构中构件的尺寸为AB=BC=BD。以构件1为主动曲柄,使滑块3沿直线导轨AC上下滑动,则连杆2D点的轨迹为垂直AC的一条水平直线。
例5.2-52 行星轮直线机构

机构中,固定中心齿轮2的节圆半径等于行星齿轮1的节圆直径。主动系杆H带动双联行星齿轮3(3′),使行星齿轮1转动,齿轮1节圆上的点A轨迹MN为直线,即点A作直线往复移动。
例5.2-53 行星轮摆杆直线机构

中心齿轮1固定。轮1节圆半径等于行星齿轮4的节圆直径。在轮4上固联的摆杆5,其长度与系杆2相等。当主动系杆2带动行星轮3、4绕固定轮中心O转动时,摆杆5的端点M沿轮1直径作往复直线运动。
4.1.2 近似直线机构
例5.2-54 瓦特近似直线机构

取连杆BC=0.6h,两摇杆AB=CD=1.5h,则BC中点P的轨迹为瓦特双叶形对称曲线,其形状类似对称的8字,在规定的h范围内PP′接近直线,且直线轨迹位于两固定铰链A、D水平距离的中垂线上。固定铰链A、D铅直距离为h,其偏量各为h/2。
例5.2-55 契贝雪夫近似直线机构

曲柄摇杆机构OABC的各杆长度为: ;
; 。当曲柄OA在左半圆周转动时,连杆M点的轨迹为近似水平直线。
。当曲柄OA在左半圆周转动时,连杆M点的轨迹为近似水平直线。
例5.2-56 罗伯特近似直线机构

利用铰链四杆机构连杆的某点轨迹中一段近似直线作为直线导引机构,称为罗伯特连杆机构。各杆的尺寸关系为;AB=CD=0.584h;BC=0.592h;AD=h。在BC的垂直平分线上取EM=1.112h,则连杆M点的轨迹为近似直线。若AB=CD=0.6h,BC=0.5h,则M′点近似沿AD作直线往复移动。
例5.2-57 起重机近似直线机构
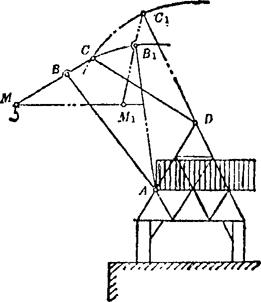
起重机的吊钩由M点移至M1的轨迹应为直线。图示双摇杆机构ABCD中连杆上的M点轨迹近似为直线。