换向机构
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1855页(3416字)
换向机构,通常是通过操纵杆变换传动构件间的关系,来改变从动件运动方向。换向操作有人工手动和自动两类。能用来实现换向功能的机构形式主要有惰轮式、棘轮式、附加离合器式、滑移齿轮式、行星式及差动式等。在换向机构中,有些仅是换向,不改变传动比;而有些则在换向的同时,传动比亦随之发生变化。至于换向操作的工作状态,有的需要停车,而大部分无须停车,可在运行状态进行。
例5.2-137 双惰轮换向机构
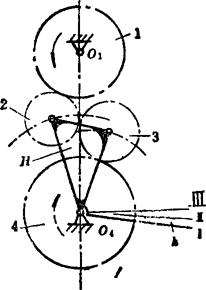
惰轮支持板H上装有惰轮2、3,换向操纵杆h与支持板H固联,并可绕O4轴转动。通过控制换向杆h于图示的Ⅰ、Ⅱ、Ⅲ位置,可实现从动轮4的换向。当置h于Ⅰ位置时,齿轮1、2、3、4啮合传动,从动轮4与主动轮1转向相反;当置h于Ⅱ位置时,惰轮2、3与主从动轮脱啮,从动轮4不转动;当置h于Ⅲ位置时,1、3、4啮合传动,主从动轮转向相同。不论两惰轮的齿数如何,换向后传动比不变。
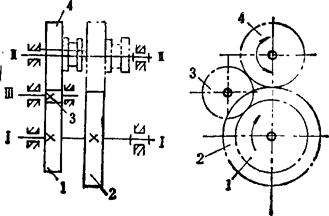
例5.2-138 三惰轮换向机构
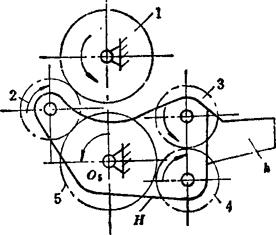
换向操纵杆h与附有惰轮2、3、4的支持板H固联,并可绕O5轴转动。通过换向杠h可控制惰轮与主、从动齿轮的啮合传动,以改变从动轮5的转向。若主动轮1逆时针向转动,当控制h使1、2、5啮合时,从动轮5的转向为逆时针;当控制h使1、3、4、5啮合时,5的转向变为顺时针;而当控制h使轮2、3均不与轮1啮合时,轮5停转。与两惰轮换向机构相比,该机构可减小主、从动齿轮的中心距。
例5.2-139 偏心惰轮换向机构
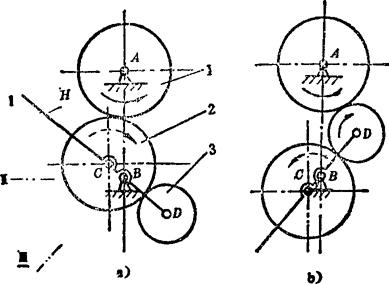
换向操纵杆H附有可绕C、D轴转动的常啮齿轮2、3。H绕固定轴B上下摆动,可在图a)所示的ⅠⅡ、Ⅲ位置控制齿轮1、2、3的啮合情况,以实现从动轮2的换向。当置换向杆H于图a)所示的Ⅰ位置时,主动轮1直接与从动轮2啮合,轮2与轮1转向相反;当置H于Ⅲ位置时,如图b),1、3、2啮合,轮2与轮1转向相同;若置H于Ⅱ位置,则1、2处于脱啮状态,轮2不转。其特点是,从动轮2的轴线位置在换向时发生变化,即输出轴为行星轴。该机构可用于车床作反转装置。
例5.2-140 棘轮换向机构
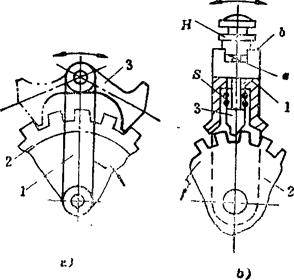
图a)中,若将棘爪3置于实线所示的一侧,则主动摆杆1往复摆动,通过棘爪驱动棘轮2作顺时针向间歇转动;若将3置于虚线所示的一侧,则1通过棘爪驱动2作逆时针向间歇转动。在图b)中,主动摆杆1装有与换向手柄H固连的一侧为铅直面另一侧为斜面的移动棘爪3。向上提起手柄H,并绕其移动轴线旋转某角度,可改变棘爪3与棘轮2的接触,以实现换向。如图示接触情况,即棘爪3铅直面在左侧时,棘轮2作逆时针向间歇转动;若将3提起,并旋转180°放下,即铅直面在右侧时,2作顺时针向间歇转动;若将3提起,并旋转90°放下,使H的a面置于1的b面上,则3被提高,脱开轮2,从动棘轮2不转。
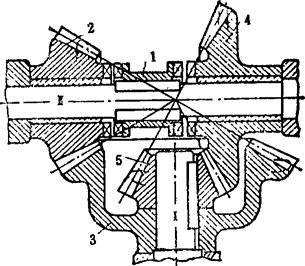
例5.2-141 摩擦差动换向机构
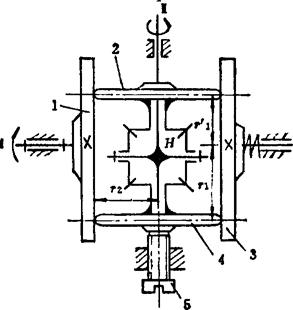
机构中的摩擦盘2、4各自固联一锥齿轮,并与另外两个锥齿轮及系杆H组成差动轮系。H与从动轴Ⅱ固联,轮2、4空套在轴Ⅱ上,从动轴Ⅱ与主动轴间的传动关系为

由式可知:若 ,则n2=0;若
,则n2=0;若 >0,则nⅡ、nⅠ转向相同;若
>0,则nⅡ、nⅠ转向相同;若 ,则nⅡ、nⅠ转向相反。通过旋转调整螺钉5,可调节整个差动轮系的位置,使之上升或下降,借以改变摩擦半径r1和
,则nⅡ、nⅠ转向相反。通过旋转调整螺钉5,可调节整个差动轮系的位置,使之上升或下降,借以改变摩擦半径r1和 ,达到使Ⅱ轴换向的目的。
,达到使Ⅱ轴换向的目的。
例5.2-142 离合器-锥齿轮换向机构
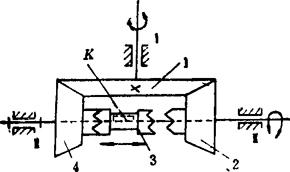
机构中的锥齿轮2、4空套在从动轴Ⅱ上,爪式离合器3用花键K与轴Ⅱ联接。通过操纵离合器3与2或4的接合,可实现从动轴Ⅱ的换向。当使3移向左端与4接合时,主动轮1通过3带动从动轴Ⅱ转动;当使3移向右端与2接合时,主动轮1通过3使轴Ⅱ反向转动。其特点是传动比不变。
例5.2-143 制动器-差动轮系换向机构
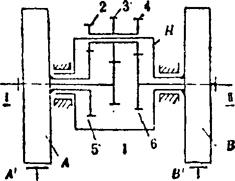
机构中的主动轴Ⅰ和从动轴Ⅱ分别空套有刹车轮A和B,齿轮5与轮A固联,系杆H与轮B固联。系统为差动轮系,可通过制动器A′、B′的制动与松开来实现从动轴Ⅱ的换向.当B′制动-A′松开时,系统为定轴轮系,按1-3-4-6传动,Ⅱ轴与Ⅰ轴转向相同;当A′制动-B′松开时,Ⅰ、Ⅱ两轴的传动关系为
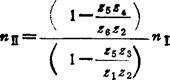
由式可看出,只要使各轮的齿数满足z3·z5>z1·z2或r4·z5>z2z3的关系,轴Ⅱ的转向便与轴Ⅰ相反。这样,只需变换刹车轮即可换向,且换向的同时也改变传动比。
例5.2-144 滑移齿轮换向机构
齿轮4用花键与从动轴Ⅱ联接。4可在轴Ⅱ上左右滑移,分别与齿轮3、2啮合,借以改变轴Ⅱ的转向。当使滑移齿轮4移向与3啮合的一边时,主动轴1通过齿轮1、3、4带动从动轴Ⅱ同向转动;当使4移向与2啮合的一边时,轴Ⅰ通过齿轮2、4带动轴Ⅱ转动,Ⅱ与Ⅰ转向相反。
例5.2-145 滑移齿套锥齿轮换向机构
机构中的锥齿轮3、5与主动轴Ⅰ固联,锥齿轮2、4空套在从动轴Ⅱ上,滑移齿套1以花键与轴Ⅱ联接,可在轴Ⅱ上左右滑移,且能分别与2、4齿轮联接。通过控制齿套的滑移,可实现从动轴Ⅱ的换向。当使1右移与4接合时,主动轴Ⅰ通过齿轮5、4带动从动轴Ⅱ正向转动;当使1左移与2接合时,轴Ⅰ通过3、2带动轴Ⅱ反转。换向后传动比发生变化。
例5.2-146 摆动自动换向机构
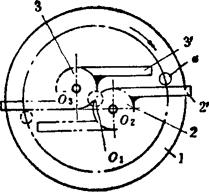
机构中的主动圆盘1绕固定轴O1转动,设有销a,常啮齿轮2、3分别绕自身固定轴O2、O2转动,且分别固联有杆2′、3′,其方位如图实线所示。当主动盘顺时针方向转动时,销a带动杆2′同向转动,并通过齿轮2使从动齿轮3逆时针转动;转至图示的双点划线位置时,销a与杆2′脱离,转而推动杆3′,此时从动轮3改为顺时针转动,从而实现自动换向。
例5.2-147 往复转动自动换向机构

机构中的锥齿轮2、3空套在轴4上并与主动锥齿轮1啮合,离合器K与轴4以花键联接。同轴4固联的锥齿轮4′与附有销a的从动锥齿轮5啮合。为实现自动换向,附设由构件6-7-8-9构成的连杆机构。从动轮5的换向依赖于离合器K左右滑移所处的位置。若从K位于右边时开始,则传动路线为1-3-K-4-4′-5,5作顺时针向转动;当5的销a顺时针一同转动到虚线位置时,开始带动杆9使连杆机构动作,杆7顺时针转动,在杆7到达O轴左侧某位置的瞬间,弹簧S拉动杆6向左摆,并带动离合器K滑移至左边,此后其传动路线为1-2-K-4-4′-5,轮5作逆时针向转动,销a转而逆时针向带动杆9,从而实现从动轮5的周期性自动换向。