行星轮转速的计算
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1994页(1111字)
对于图5.7-1所示轮系,行星轮轴线平行于轮系主轴线,可用转化机构法求得行星轮转速nc。即:

如图5.7-5所示由圆锥齿轮组成的行星轮系,因其行星轮轴线与中心轮和系杆的轴线不平行,故行星轮的转速不可用转化机构法计算,而应用矢量图法求解。
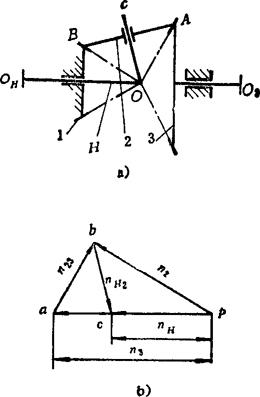
图5.7-5 转速矢量法求行星轮转速
根据运动学原理,构件的转速可以表示为沿其旋转轴线的一个矢量,称为转速矢量。其表示法规定如下:
① 矢量的方位沿构件的转动轴线。对于作复合转动的构件,绝对转速矢量沿绝对转动的轴线,相对转速矢量沿相对转动的轴线,牵连转速矢量沿牵连转动的轴线。
② 矢量的方向按右手法则决定。
③ 矢量的大小等于转速的绝对值。
例5.7-1 如图5.7-5所示圆锥齿轮行星轮系,若已知各构件尺寸,轮1固定不动,轮3主动,转速为n3,试求行星轮2的转速n2及系杆的转速n4。
解:先选定长度比例尺,绘制机构简图(见图5.7-5a),再写出作复合转动的行星轮的转速矢量方程

式中 n2为轮2的绝对转速矢量;n1为轮1的绝对转速矢量,也是轮2的牵连转速矢量;n21为轮2相对轮1的相对转速矢量,其方位沿相对转动的瞬时轴线即啮合节圆锥的母线OB。因为n1=0,所以n2=n21。这说明n2与n21大小相等,方向一致。
同理,行星轮2的转速矢量方程为:
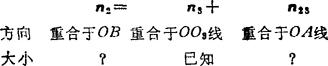
该矢量方程只有两个未知量,可应用矢量多边形求解。在选定转速比例尺μn后,作矢量多边形(见图5.7-5b) 可解得行星轮2转速
n2=μn·pb
把矢量pb平移到图a)的OB轴线上,按右手法则,可确定行星轮2的转向。
系杆H转速矢量方程式如下:
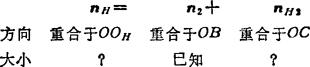
作矢量多边形(见图5.7-5b)可解得系杆H转速
nH=μn·pc
将矢量pc平移到系杆H的转动轴线OOH上,用右手法则可确定系杆的转向。由图看出,pc和pa指向相同,即轮3和轮2的转向相同。