几何计算示例
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第2056页(3005字)
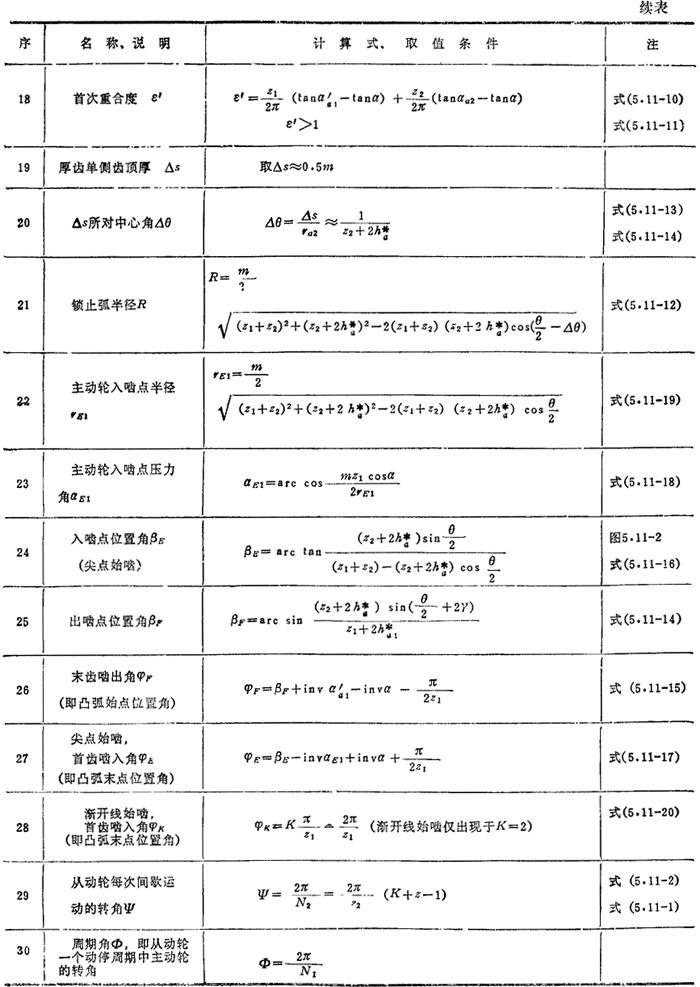
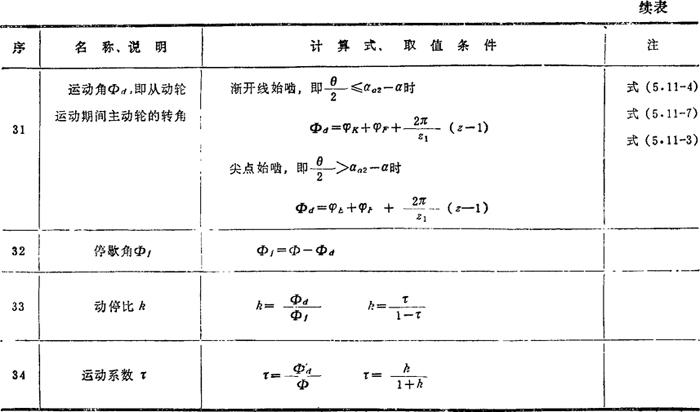
渐开线齿外啮合不完全齿轮机构的几何计算式汇总于表5.11-5。
表5.11-5 渐开线齿外啮合不完全齿轮机构几何计算

例5.11-1 如图5.11-1a)所示机构,求其动停比。已知:z1=40、z2=15、z=14、K=2、N2=1、N1=2(具有实线及虚线所示的两个齿段),a=20°。 。
。
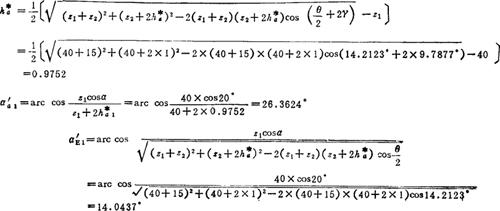
解1:按计算式求解。

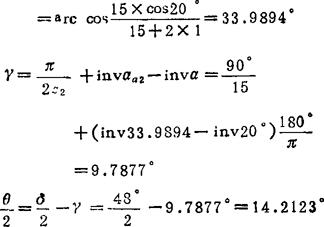
因 a02一a=33.9894°-20°=13.9894°
可见, ,即该机构为尖点始啮。
,即该机构为尖点始啮。

经以上计算可知,该机构的动停比为3.28。
解2:用查表法求解。
查表5.11-1可知,K=2、z1=40、z2=15时,=9.00°、φF=11.95°。于是
可见查表法甚为简便。
例5.11-2 要求主动轮每转一周从动轮动停一次(即N1=1),从动轮每转一周停歇五次(即N2=5),动停比k=1/3,允差±5%。试进行设计计算以确定不完全齿轮机构的结构参数z1、z2、z、K、h 1、R、φE(或φK)和φF。
1、R、φE(或φK)和φF。
本例的求解步骤如下:
① 由于z2必须是N2的整倍数,可取z2=…30、35…等,故现试取z2=45。
② 由图5.11-5可知,当z2=45时,K可取为2或3。现试取K=3。
③ 计算z值(按表5.11-5序9):

④ 计算Φ值:
⑤ 求应有的Φd

应有 Φd=τΦ=0.25×360°=90°
⑥ 估算z1值:
取φE+φF≈ (1),则由式5.11-3可得
(1),则由式5.11-3可得
代入K=3,z=7,Φd=90°,得

⑦ 查表5.11-2可知,当K=3、z1=36、z2=45时,h =0.826、φE=14.78°、φF=17.53°。
=0.826、φE=14.78°、φF=17.53°。
⑧ 计算实际动停比:

可见,与题意要求的k= 相比较其误差为
相比较其误差为 ,在±5%允差之内.
,在±5%允差之内.
至此,虽已可以确定z1、z2、z、K、h 1、φE、φF,然后计算R,即可结束设计计算,但为比较不同方案,也可再求取另一组参数。现重复上述步骤,先取z2=30、K=2,再计算得z=5。Φ=360°,应有的Φd仍为90°,估算得z1=24,查表5.11-1得h
1、φE、φF,然后计算R,即可结束设计计算,但为比较不同方案,也可再求取另一组参数。现重复上述步骤,先取z2=30、K=2,再计算得z=5。Φ=360°,应有的Φd仍为90°,估算得z1=24,查表5.11-1得h 1=0.544,φF=18.81°。因表中φE值空缺,可知为渐开线始啮,故计算
1=0.544,φF=18.81°。因表中φE值空缺,可知为渐开线始啮,故计算

k=0.3524.此k值误差为0.057,已超出允差.为寻求第三方案,仍取z2=30、K=2,但改取z1=25,再重复步骤⑦、⑧,得h 1=0.511,φF=18.04°.φk=14.4°,Φd=90.04°.k=0.334.显然,这一方案动停比误差仅为0.0006,优于第一方案,应予采用。
1=0.511,φF=18.04°.φk=14.4°,Φd=90.04°.k=0.334.显然,这一方案动停比误差仅为0.0006,优于第一方案,应予采用。
确定了z1、z2、K后,计算R值:

取△s=0.5m,则


当从强度或其它条件确定m后,R也就确定了。
例5.11-3 绘制图5.11-1a)、b)两机构的i21和φ2随φ1而变化的线图(示意)。图a)机构数据见例5.11-1;图b)机构数据见例5.11-2。
解:图a)机构在定传动比时i21=z1/z2=40/15≈2.67;由例5.11-1的解可知Φd=137.95°,且为尖点始啮,故可示意绘出i21~φ1曲线如图5.11-6中的线1。当φ1由零增至Φd时,φ2由零增至ψ= =
= =2π,以后轮2则保持不动,由此可绘出线2。同理,可绘出表示虚线齿段i21、φ2的线3、线4。
=2π,以后轮2则保持不动,由此可绘出线2。同理,可绘出表示虚线齿段i21、φ2的线3、线4。
图5.11-6 i21和φ2随φ1而变化的线图(例5.11-3)
图b)机构在定传动比时i21=z1/z2=25/30≈0.83;由例5.11-2的解可知Φd=90.04°,且为渐开线始啮,故可绘出线5。当φ1由零增至Φd时,φ2由零增至ψ= =
= ,当φ1继续增至2π之前,轮2保持不动,由此可绘出线6。轮1转一周后,运动重复进行,φ2逐次递增,当轮1转5周角时,轮2转1周角,由此可绘出线6-6。虚线7是虚线齿段的i21;线6-8-8是具有不均布的虚线齿段时的φ2。
,当φ1继续增至2π之前,轮2保持不动,由此可绘出线6。轮1转一周后,运动重复进行,φ2逐次递增,当轮1转5周角时,轮2转1周角,由此可绘出线6-6。虚线7是虚线齿段的i21;线6-8-8是具有不均布的虚线齿段时的φ2。
例5.11-4 不完全齿轮副几何尺寸设计图示例。图5.11-7中主动轮首齿齿顶圆半径的公差按IT11级标准公差确定,末齿按IT9级。首齿齿顶圆半径的上偏差取为某一负值(-0.07),以确保不发生齿顶干涉(因首次重合度足够大,为1.587,故公差还可增大,比如可按IT12)。末齿齿顶圆半径下偏差取为某一正值(+0.05),以便能将从动轮推到应有的停歇位置。凸锁止弧半径、凹锁止弧半径及其位置尺寸(49.69)的公差按IT6或IT7级,且均取负偏差。锁止弧表面粗糙度可取 或
或 凸锁止弧始末点位置角取负偏差,半径较大时角度公差宜取小,反之可取大。这里的角度公差(6'),相当于允许始末点沿圆周方向可有0.2mm的位置变动。
凸锁止弧始末点位置角取负偏差,半径较大时角度公差宜取小,反之可取大。这里的角度公差(6'),相当于允许始末点沿圆周方向可有0.2mm的位置变动。
图5.11-7 几何尺寸图 (例5.11-4)