电子经纬仪的组成
出处:按学科分类—工业技术 中国建材工业出版社《工程测量实用技术手册》第456页(9681字)
电子经纬仪最初出现于20世纪80年代初期,其使用光电测角系统替代原光学经纬仪的光学度盘与读数系统,将光学读数方式变为数字显示方式。虽然早期的电子经纬仪需要人工读数和记录,但这一变革为实现自动读数和自动记录创造了条件。
此后,能够进行全自动读数、记录和测站数据处理的电子经纬仪出现。近几年来,电子经纬仪与光学经纬仪在光机性能方面不相上下,在数据获取、处理及记录功能方面更具先进性,价格也在逐年降低,因而获得广泛的应用。
与光学经纬仪相比,电子经纬仪的最大的特点是:一是采用了光电角度传感装置;二是增加了电子数据处理与存储系统。
电子经纬仪的光机系统与光学经纬仪类似,可以分为照准部、水平度盘和基座三大部分。其主要区别是去掉了光学读数系统,增加了实现数据的记录、处理和存储的电子系统。
1.电子系统
最初的光栅电信号为模拟信号,经过放大、模数转换、整形等处理后,变为规则的数字信号。包括计数电路、显示电路、存储电路等,实现电子经纬仪的数据管理功能。图18-69是电子经纬仪的工作方框图。电子经纬仪若用单片机控制则要比全站仪差一些,程序指令也要简单一些。

图18-69 电子经纬仪整体方框图
2.电子经纬仪的光学系统
由于免除了光学经纬仪复杂的光学测微和读数系统,电子经纬仪的光学系统大为简化。但在照准光学系统(望远镜等)方面,两者差别不大。
在读数光学系统上,电子经纬仪只剩下包括光栅度盘、光源(发光二管)、测微光栅、光电接收器等极少量的光电子元件,因此只保留了一些较简单的光学系统。
3.电子经纬仪的机械系统
电子经纬仪的机械系统与光学经纬仪基本相同,即主要由安置系统、整平系统、制动与微动系统、轴系、支撑和防护系统等多种功能的200余个独立的机械元件组成。电子经纬仪的主要创新并非机械系统,其相应结构可参阅光学经纬仪的有关书籍。这里主要介绍电子经纬仪中普遍使用的竖盘指标自动归零装置。
4.电子经纬仪的倾斜补偿器
在测量工作中,有许多方面的因素影响着测量精度,其中竖直轴、水平轴和水准管轴的不正确安装或整置是最重要的因素。为了减少测量误差,人们常采用盘左、盘右取平均值的测量方法。有不少工程有时只需一个盘位测量就能满足精度要求,另外有些工程放线等工作并非由专业测量人员进行,这就要求仪器能自动减少轴系误差的影响。现代电子经纬仪一般都设置了补偿器,竖轴剩余倾斜对观测结果的影响能进行自动补偿。
在光学经纬仪中为了克服竖轴剩余倾斜对竖直角的影响,通常采用竖盘指标水准管指标自动归零补偿器使指标处于正确位置。在过去的电子经纬仪中,一般都设置了一个倾斜传感器(或称整平传感系统),以代替竖盘指标水准管或竖盘指标自动归零装置,即为单轴补偿。而现代电子经纬仪,由于传感器可做两个方向的补偿,即双轴补偿,仪器作业时,只要用圆水准粗略整平,其竖轴剩余倾斜可通过倾斜传感器以信号形式输入机内微处理机,对所测的竖直角和水平角进行自动改正。
补偿器的作用就是通过寻找仪器在垂直和水平方向的倾斜信息,自动地对测量值进行改正,从而提高采集数据的精度。
(1)补偿器的分类
按补偿范围一般可分为:
1)单轴补偿。只能补偿由于垂直轴倾斜而引起的竖盘读数误差。
2)双轴补偿。可同时补偿由于垂直轴倾斜而引起的竖盘和水平盘的读数误差。
3)三轴补偿。不仅补偿由于垂直轴倾斜引起竖盘和水平盘读数误差,还能补偿由于水平轴倾斜误差和视准轴误差引起的水平盘读数误差。
(2)补偿器类型
补偿器的类型一般有两种,即摆式补偿器和液体补偿器。前者为老式补偿器,多见于早期电子经纬仪,如T1000、T1600等;当今所有的电子经纬仪和全站仪几乎都采用液体补偿器。
(3)补偿范围
补偿范围是指仪器允许偏离水平面的程度,在此范围内补偿器测量横向的倾斜量,进而对仪器的竖盘和水平盘读数进行修正。
(4)补偿精度
仪器使用手册上给出的通常是仪器的设置精度,是指仪器对倾斜量的测量精度。
5.电子经纬仪的倾斜传感器
各种电子经纬仪中倾斜传感器的结构形式各异,但工作原理基本相同。
(1)液体式
液体式倾斜传感器的典型结构之一如图18-70所示,静态液面的法线方向即为铅垂直方向,T1T1为平行于仪器横轴的轴线,T2T2为垂直于横轴、平行于竖盘面的轴线,并假设横轴垂直于竖轴。当竖轴处于铅垂状态时,竖轴即与液面正交。此时从位于T2T2轴线上的发光二极管(简称为LED)射出的光束经液面反射后,会聚于光电二极管阵列上。入射角为θ的光束(图中以中心光线表示)经液面反射后,投射到阵列中间第三个光电二极管上,从而产生光致电流信号。该信号输入到机内控制微处理器中,这就表明该轴线处于水平位置。类似布置于T1T1轴线上的另一组光电二极管阵列,光线亦投射到阵列中的第三个光电二极管上,产生光致电流信号。这两个信号同时输入到微处理器中,这就表明仪器竖轴是铅垂的,由水平和竖直度盘读得的角度值是正确的。

图18-70 液体式倾斜传感器典型结构之一
若竖轴相对液面法线方向倾斜了一小角度i,并将它分解为经纬仪横轴方向的分量τ0及望远镜视准轴方向(即平等于竖盘盘面的方向)的分量τp0,假设从轴线T2T2上发光二极管射出的光束与液面法线成τ1入射角,若经液面反射至第5个光电二极管,产生电流信号,经精心设计后,可使第5个光电二极管输出的电信号与τp角值对应。由机内微处理器的预存程序对竖盘读数进行自动改正,相当于竖盘指标自动归零。同理,由平行于横轴轴线T1T1上的光电二级管可得到对应的角值,亦可由微处理器程序对水平读数进行改正。由此可知,具有双轴线倾斜传感装置的电子经纬仪,一般只配置圆水准器即可,而只具有单轴线倾斜传感器的仪器,除配置圆水准器外,还须配置照准部水准管,以保证水平盘和竖盘读数的正确性。
图18-71为倾斜传感器的光学系统。底部有水银槽,水银上表面的法线方向即是铅垂方向,水银层上面有硅油阻尼层,以防止水银氧化并起阻尼作用。其上嵌装了一块镀有增透膜的平板玻璃。照明透镜由一片正透镜和一片负透镜组成,其光学系统的等效焦距为163mm。

图18-71 倾斜传感器光路
竖盘上的刻划线通过转向棱镜及液体盒后,由成像透镜成像于水平度盘刻划面A处,然后两个度盘的刻划线同时成像于指标平面上。当仪器倾斜角时,竖盘倾斜变化的弧度值为r·α,而光线通过液体产生的偏折角为β,考虑到补偿条件,则得:
r·α=β·g
式中 r——竖盘刻划;
g——补偿器液面至竖盘刻划面的距离。
因为β=(n-1)α,取n=1.5,则β=0.5α,所以补偿摆的角放大系数为:

所以
g=2r
倾斜传感装置检测倾斜量的范围(即工作范围)因仪器实际尺寸的不同而不同,一般若仪器斜置超出了范围,它就会自动发出音响或显示光信号,以警示操作者。
HP3820A型电子速测仪的测量即是双轴线倾斜传感器的应用实例之一。
双轴线排列的正弦形透明缝隙(也称透明光迹)和4只光电二极管,安置在准直系统的焦平面处,如图18-72所示。设置两组正弦透明缝隙和光电二级管陈列的目的,是为了分别检测竖轴在平行横轴方向与平行竖盘方向时的倾斜分量。将图18-71和图18-72结合起来可以看出,当仪器倾斜时,活动的水银面仍保持水平,水银面的反射使正弦光迹的投影相对于光电二极管阵列发生位移,因而产生电信号的相移。利用前章所述电子测相细分的方法,可分别求出两轴线方向的倾斜改正值。该仪器的测定精度可达±0.3″(即±1cc)。

图18-72 双轴线倾斜传感器
为了防止倾斜传感器超出极限工作范围,另外设置了极限传感器。当竖轴倾斜量在工作范围以内时,经方形图样射出的光束将投射到极限传感器上。若竖轴倾斜超出了工作范围,经方形图样射出的光束就投射到极限传感器上,这时仪器便自动发出警告信号给操作者。这类仪器的极限工作范围为±150″。
(2)电容式
电容式倾斜传感器属单轴线倾斜传感器,其结构如图18-73所示,水准管内壁下部全长镀银层,上部对称镀两段银层,管内充电容量与电介系数ε成正比,而与平板间距d成反比,可用下式表示:

图18-73 电容式倾斜传感器
由电子技术可知,RC振荡器及LC振荡器(包括晶体振荡器)的谐振频率f0分别可由电容量C决定。由图18-73可知,电容器极板面积S随气泡位置的变化而变化,从而改变电容量C,由式(I2-I4)=2Icosφsinωt知,亦可改变振荡器的输出频率f0。
设计制造时使气泡居中,即电容量C1或C2相等,故振荡器输出频率f1与f2也相等。气泡不居中时,由于S1≠S2,则C1≠C2,故振荡器输出的频率f1与f2也不相等。设计时使f1与f2一定量的差值△f1对应一定的气泡偏移量。
测量竖直角时,电子开关使电容C1和C2依次分别接入振荡回路中,振荡器相应地输出振荡频率f1和f2至微处理机,微处理机依频率差值△f=f1-f2的大小,对所测竖直角进行修正,以消除竖轴剩余倾斜对竖直角观测值的影响。
为了消除温度变化对电容式倾斜传感器气泡灵敏度的影响,仪器内设置了电子温度传感器。它将测得的环境温度参数输入微处理机,以修正温度对C1、C2及f1、f2的影响。
6.竖盘指标自动归零装置
电子经纬仪上一般使用竖盘指标自动归零补偿器,不但加快了作业速度,简化了仪器结构,也扩大了仪器使用范围,其基本原理与光学经纬仪的竖盘指标自动归零补偿器相似。下面介绍光学经纬仪竖盘指标自动归零装置的原理。
(1)基本原理
在图18-74中, 表示视准轴,与标有注记的竖盘一同旋转。指标线A(通过反射棱镜展开与90°成一直线),通过透镜O成像于竖盘分划线位置。图18-74(a)表示为理想关系,即望远镜水平,竖轴铅垂,指标A成像于90°分划处。如图18-74(b)所示,当仪器倾斜一角度α(此角值在照准部水准器安平精度范围以内,一般不大于±1′),由于是整个仪器倾斜,指标水准器气泡未居中,此时竖盘读数仍为90°未变。虽然指标线位置由A移至A′,但A′、O、90°三者的相对位置未变。图18-74(c)表示将倾斜视准轴重新安平后的情况,此时指标线仍处于原位置,则读数不等于90°,而为K。此时可将指标水准管居中读数变为90°,此时仪器虽倾斜了α角,但竖盘读数仍为90°,视准轴水平,即不受仪器倾斜的影响。
表示视准轴,与标有注记的竖盘一同旋转。指标线A(通过反射棱镜展开与90°成一直线),通过透镜O成像于竖盘分划线位置。图18-74(a)表示为理想关系,即望远镜水平,竖轴铅垂,指标A成像于90°分划处。如图18-74(b)所示,当仪器倾斜一角度α(此角值在照准部水准器安平精度范围以内,一般不大于±1′),由于是整个仪器倾斜,指标水准器气泡未居中,此时竖盘读数仍为90°未变。虽然指标线位置由A移至A′,但A′、O、90°三者的相对位置未变。图18-74(c)表示将倾斜视准轴重新安平后的情况,此时指标线仍处于原位置,则读数不等于90°,而为K。此时可将指标水准管居中读数变为90°,此时仪器虽倾斜了α角,但竖盘读数仍为90°,视准轴水平,即不受仪器倾斜的影响。

图18-74 竖盘指标自动归零基本原理
现在,不再用指标水准器微动螺旋使气泡居中(即不使A′→A),而是通过某种方法使A′能自动地摆到A,或者使A′能永远在90°处成像。例如,OA为一悬挂垂球的线,不管仪器倾斜与否,它永远处在铅垂位置,即实现了自动归零的目的。
在精度更高的光学经纬仪上,竖盘以及水平盘的读数指标线相对仪器是固定的,在使指标水准器气泡居中的过程中,指标线是不动的,与指标水准器一起偏转的是指标与度盘之间的成像光具组。如图18-74中的O,用成像光具组的位移造成指标线影像的移动,也可以视为改变竖盘分划线影像与指标线之间的相对位置。以下介绍几种自动安平补偿器的结构与基本原理。
1)悬吊透镜补偿器
实现悬吊透镜补偿的方法是,将指标线与竖盘之间的某一个(或组)光学零件进行悬吊,如将成像透镜O进行悬吊[图18-74(c)]。
当仪器倾斜了α角,指标线位移至A′点,望远镜视准轴水平后,只要A′的像能位于90°处,如图18-75(a),则实现了自动归零。仪器倾斜后透镜若是固定于仪器上,则随仪器倾斜至O(图上虚线所示),A′通过透镜中心成像于K处。但由于透镜用柔丝进行悬吊,在重力作用下由O摆至Q′。指标线A′通过摆动以后的透镜的边部,则产生折射,成像于度盘的90°处(图上粗虚线所示)。这种悬吊透镜补偿器结构简单,只是将原有的成像透镜进行悬吊,在未增加任何光学零件下,既起成像作用又起补偿作用。

图18-75 几种竖盘指标自动补偿器的原理
(a)悬吊透镜补偿器;(b)“液体盒”补偿器;(c)悬吊平板玻璃补偿器
2)“液体盒”补偿器
图18-75(b)所示为“液体盒”式补偿器原理图。当仪器倾斜后,由于“液体盒”是固定在仪器上的,将随仪器一同倾斜,但在重力作用下液面恒保持水平,则“液体盒”变成一光楔,A′通过它产生折射仍成像于竖盘90°处。
3)悬吊平板玻璃补偿器
图18-75(c)所示为悬吊平板玻璃补偿器原理图。在仪器竖盘成像光路上加挂一块厚的平板玻璃,采用V型悬吊,以扩大平板玻璃转动的角度。当仪器顺时针方向倾斜α角后,平板玻璃若是固定在仪器上,它将随仪器倾斜至虚线位置,A′垂直地通过它成像于K。但平板玻璃是用柔丝进行V型悬吊,由于重力作用摆至实线位置时,相对于固定位置转动了β角,β与α为同一方向,指标线A′通过转动后的平板玻璃产生一段平移,使成像仍位于竖盘的90°处。
设d为悬吊平板玻璃的厚度,n为悬吊平板玻璃的折射率,β为平板玻璃旋转角,则光线平移量△可按折射条件求得:

设R为竖盘分划半径,v⊥上为竖盘成像透镜组的放大率。由于仪器倾斜α角后,竖盘分划线的影像位置变化量△′为:
△′=α·R·v⊥
补偿条件是:△=△′
即

移项后得关系:

如R=38mm,d=9.6mm,v⊥=3.15倍,n=1.7172时,计算出β/α=30倍,即要求补偿器吊架的放大系数为30倍。此种放大系数必须采用V型悬吊。
4)悬吊反射棱镜补偿器
有的仪器采用悬吊反射棱镜,即在竖盘成像光路中,把其中一转向棱镜进行悬吊,从而起到自动补偿作用。这种装置也不需增加专起补偿作用的光学零件。
(2)几种典型的竖盘指标补偿器
1)簧片悬吊式透镜补偿器
簧片式悬吊透镜补偿器在经纬仪上广泛采用,它属于中等精度的补偿器,工作范围为±4′,补偿精度为±1.5″~±2.0″。
仪器竖盘光路如图18-76(a)所示,竖盘2的分划线经转向棱镜4、成像透镜0和棱镜3,成像于指标面A上。图18-76(b)为结构图,竖盘整个成像系统3、0、4均用簧片1进行悬吊。整个吊架用螺丝8(两个)固定在框架上,框架用螺丝10(4个)固定在仪器左支架内,5为限程装置,点接触部位采用玛瑙材料,黏附力几乎为零。轻轻地抖动照准部,可听到限程装置相互碰撞的清脆响声。松紧调节螺丝5个,可控制补偿器的工作范围,一般为±4′~±5′。7为活塞式空气阻尼器的活塞,对称布置两个,活塞套固定在框架上,它与活塞的相对位置可以从框架两侧进行调整。9为螺母。

图18-76 簧片悬吊式透镜补偿器
(a)光路图;(b)结构图;(c)原理图
如图18-76(c)说明补偿原理,当仪器倾斜α角后(逆时针),由于悬吊簧片的弹性回力,补偿器仅摆动了β角(顺时针),若是采用柔丝悬吊,补偿器将摆至铅垂位置。由于簧片的固定点在竖盘分划中心C以上,当补偿器摆动β角后,成像透镜O的中心仍处在通过C的铅垂线上,即指标线A经透镜O仍成像于竖盘90°分划线位置,实现了自动归零的目的。
从图18-76可看出,在此:β/α<1。
要保证这一比例关系不变,在这种簧片式补偿器上是很难做到的。从分析中我们可知,仅湿度对簧片材料的弹性模量E的影响这一项,在温度变化±30℃时,补偿误差就达到2″~3″。因此在簧片的材料和工艺方面都有专门的要求,在仪器的装调过程中可适当地改变摆体质量平衡调节螺丝图18-76(a)中6的质量、簧片的工作长度等,来满足放大系数的要求。同时在使用过程中经常注意零位误差的变化,对“指标差”应经常进行检验和校正。这种补偿器经实际作业中考核,精度比较低且欠稳定,振动特别是抗高频振动性能不佳,所以在闹市区、多风地区、高标上均出现竖盘读数不准,严重时则无法读数。但由于它比吊丝式加工和整调容易,机械强度较好,抗冲击能也比吊丝强,故在低精度仪器上还有较大的用途。如为了提高补偿器的抗高频振动性能和灵敏度,可将悬吊的簧片由吊架仅将成像透镜O悬吊,转向棱镜3、4均改为固定的,吊摆的质量由原54g减至33g左右,性能稍有提高。
2)“液体盒”式补偿器
“液体盒”补偿器属于高精度的补偿器,其工作范围为±2′,补偿精度优于为±1.0″。
威特T1-A经纬仪竖盘自动归零补偿器的结构如图18-77所示。液体盒下端的内螺纹旋在透镜管座上,用校正针插在拨孔内可旋转液体盒,使之上下移动。改变补偿器液面至竖盘刻划面的距离g可以调节补偿器的放大系数N。调整好后,旋好紧定螺母7,然后用胶封闭。
该经纬仪竖盘光路如图18-77(a)所示,在竖盘成像光路上加装了“液体盒”1,“液体盒”1为一金属的圆锥形壳体,两端透光玻璃用特种胶压封,对胶的牢固性、化学稳定性均有高要求。竖盘2上的分划线通过转向棱镜3和P1,通过“液体盒”1后,由成像透镜O成像于水平度盘分划面4处。而后两个度盘的分划线,同时成像于指标面上(俗称读数窗)。
由图18-77(a)可知,光线通过“液体盒”产生偏转角β=α(n-1)。其中,α为仪器倾斜角,n为液体的折射率(1.3~1.6)。
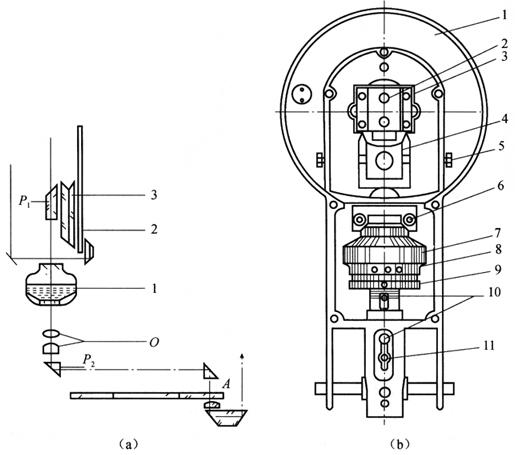
图18-77 一种“液体盒”式补偿器
(a)光路图;(b)器件结构图
若选用n=1.5,则β=0.5α。当仪器倾斜α角时,竖盘倾斜变化的弧值为R·α。补偿条件为:
R·α=β·g
式中 R——竖盘分划半径;
g——补偿器液面至竖盘分划面的距离。
上式用放大系数表示,可得:

当β=0.5α,则得
g≈2R
上式说明,补偿器液面至竖盘分划面之间的距离相当长,因此,只有特定仪器竖盘光路的布置方案才能采用。
图18-77(b)为仪器支架左侧盖板拆下后的情况:1为竖盘护盖,2为竖盘转向棱镜套固定螺丝,3为竖盘转向棱镜固定螺丝,4为棱镜3的固定座,5为指标差校正螺旋,6为照明棱镜座固定螺旋。“液体盒”7用下端的内螺纹旋在成像透镜O管座10上,用校正针插在拨孔8内,旋转“液体盒”,使之能上下移动,用以调节补偿器的放大系数,即调节求v式中的g值,调好后拨紧并紧螺母9,然后用胶封固。指标差的校正螺丝5露在仪器外部,松紧对应的两个校正螺丝,可使固定着棱镜3[图18-77(a)]的圆板作微量转动,圆板上部的小转轴是插在横轴套内旋转。11为棱镜P2的固定螺丝。