GPS全球定位系统的建立
出处:按学科分类—工业技术 中国建材工业出版社《工程测量实用技术手册》第533页(4636字)
1973年12月,美国国防部批准它的陆海空三军联合研制GPS全球定位系统。该系统的英文全称为“Navigation by Satellite Timing and Ranging/Global Positioning System(NAVSTAR/GPS)”,其中文意思为“用卫星定时和测距进行导航/全球定位系统”,简称GPS。自1974年以来,GPS计划已经历了方案论证(1974~1978年)、系统论证(1979~1987年)、生产实验(1988~1993年)三个阶段。总投资超过300亿美元。整个系统分为卫星星座、地面控制和监测站、用户设备三大部分。
1.GPS卫星星座
GPS卫星星座如图18-129所示。其基本参数如下:
卫星颗数为21+3(21颗工作卫星,3颗备用卫星),6个卫星轨道面(A~F),卫星高度为20200km。轨道倾角为55°,卫星运行周期为11h58min(12恒星时),载波频率为1.575GHz和1.227GHz,卫星通过天顶时,卫星的可见时间为5h,在地球表面上任何地点任何时刻,在卫星高度角15°以上,平均可同时观测到6颗卫星,最多可达11颗卫星。例如在我国北纬34°48′,东经114°28′一天内能够看到的GPS卫星数为:全天有50%的时间,能够看到7颗GPS卫星;有30%的时间,能够看到6颗GPS卫星;有15%的时间,能够看到8颗GPS卫星;有5%的时间,能够看到5颗GPS卫星。这表明,在我国境内全天能够见到5~8颗GPS卫星,已利于我国用户进行连续不断的导航定位测量。GPS卫星的发射情况见表18-39。

图18-129 GPS卫星星座
表18-39 GPS卫星的发射情况

注:BLOCKⅡ A(A即Advanced),Ⅱ R(R即Replacement),Ⅱ F(F即Follow on)。
如图18-130所示,GPS工作卫星的主体呈圆柱形,直径为1.5m,在轨重为843.68kg,两侧安装有4片拼接成的双叶太阳能电池翼板,总面积为7.2m2,设计寿命为7.5年,实际上均能超过该设计寿命而正常工作。卫星上安设有四台高精度的原子钟(一台使用,三台备用),两台铷原子钟(频率稳定度为1×10-12),两台铯原子钟(频率稳定度为1×10-13),以减少时间误差引起的站星距离误差。卫星姿态采用三轴稳定方式,致使螺旋天线阵列所辐射的电磁波束对准卫星的可见地面。
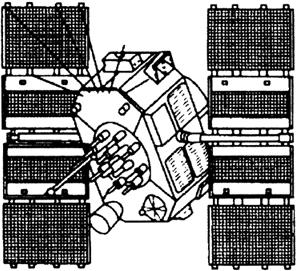
图18-130 GPS工作卫星
GPS工作卫星的作用可概括为如下几点。
1)用L波段的两个无线载波(19cm和24cm波段)向地面用户连续不断地发送导航定位信号(简称GPS信号),并用导航电文报告自己的现势位置以及其他在轨卫星的概略位置。
2)在飞越地面注入站上空时,接受由地面注入站用S波段(10cm波段)发送的导航电文和其他有关信息,适时地发送给广大用户。
3)接受由地面主控站通过注入站发送的卫星调度命令,适时地改正运行偏差或启用备用时钟等。
2.GPS地面监控系统
如图18-131所示,GPS的地面监控系统,目前主要由分布在全球的5个地面站所组成,其中包括卫星主控站、监测站和注入站。
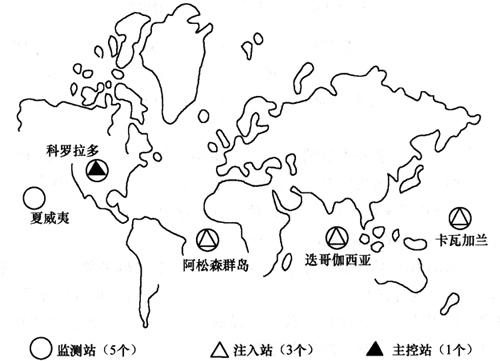
图18-131 地面监控系统分布图
(1)主控站(1个)主要任务
根据所有观测资料编算各卫星的星历、卫星钟差和大气层的修正参数,提供全球定位系统的时间基准,调整卫星运行姿态,启用备用卫星。
(2)监测站(5个)主要任务
对GPS卫星进行连续观测,以采集数据和监测卫星的工作状况,经计算机初步处理后,将数据传输到主控站。
(3)注入站(3个)主要任务
在主控站的控制下,将主控站编算的卫星星历、钟差、导航电文和其他控制指令等,注入到相应的卫星存储系统,并监测注入信息的正确性。
3.GPS用户设备部分
用户接收部分的基本设备,就是GPS信号接收机、机内软件以及GPS数据的后处理软件包。GPS接收机硬件一般包括主机、天线和电源,也有的将主机和天线制作成一个整体,观测时将其安置在测站点上。
GPS用户设备主要包括有GPS接收机及其天线,微处理机及其终端设备和电源等。其中接收机和天线是用户设备的核心部分,它们的基本结构如图18-132所示。
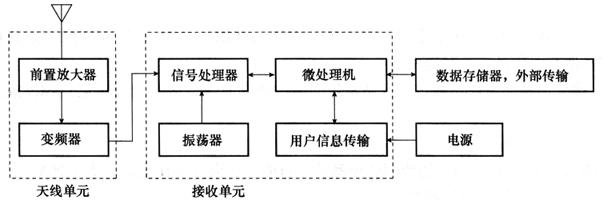
图18-132 GPS信号接收系统的结构
GPS信号接收机的任务是:跟踪可见卫星的运行,捕获一定卫星高度截止角的待测卫星信号,并对GPS信号进行变换、放大和处理,解译出GPS卫星所发送的导航电文,测量出GPS信号从卫星到接收机天线的传播时间,实时地计算出测站的三维位置、三维速度和时间。
近年来,国内引进了许多种类型的GPS测地型接收机。各种类型的GPS测地型接收机用于精密相对定位时,单频接收机在一定距离内精度可达10mm+2×10-6×D,其双频接收机精度可达5mm+1×10-6×D。用于差分定位时其精度可达亚米级至厘米级。GPS和GLONASS兼容的全球导航定位系统接收机也已经被一些部门采用。
目前,各种类型的GPS信号接收机体积越来越小,重量越来越轻,便于野外观测。它们按用途的不同,可分为导航型、测地型和授时型三种;按携带形式的不同可分为袖珍式、背负式、车载式、舰用式、空(飞机)载式、弹载式和星载式七种;按工作原理可分为码接收机和无码接收机,前者动态、静态定位都能用,后者只能用于静态定位。按使用载波频率的多少可分为单频接收机(用一个载波频率L1)、用两个载波频率(L1、L2)的双频接收机和双星接收机(同时接收GPS和GLONASS卫星信号),以双频和双星接收机为今后精确定位的主要用机。三星接收机(同时接收GPS、GLONASS和Galileo卫星信号),由于Gali1eo卫星星座还未布成,故其功能目前与双星接收机相同。按型号分,种类就更多。
4.GPS现代化
GPS现代化的主要目的是军民分离,强化军用。其政策是:保护战区内的美方军用;防止敌方开拓GPS军用;保护战区外的GPS民用。
(1)分离军民用户伪噪声码的频带,增强军用伪噪声码的发射功率
GPS系统的建设初衷,是为美国的陆海空三军服务的,民用只是一种后续开发的意外结果。从有限资料分析可知,军民分离,复用频谱,将成为首选技术。第三民用信号(L5)按计划已在2005年始发的Block Ⅱ F卫星上付诸实施。
(2)GPS新型工作卫星在轨自主更新星历,提高GPS系统的抗毁能力
2003年开始发射的Block Ⅱ R-M卫星具有下列特点:
1)能够作GPS卫星之间的距离测量。
2)能够在轨自主更新和精化GPS卫星的广播星历和星钟参数。
3)能够进行GPS卫星之间的在轨数据通讯。
4)无需地面监控系统的干预,Block Ⅱ R-M卫星能够自主运行180d作导航定位服务,且在180d时,用户测距误差仍可达到±7.4m;比Block Ⅱ A卫星的测距误差小1350倍。
5)在180d的自主运行周期内,为了使测距误差达到±5.3m,每隔30d由地面监控系统作210d的星历和星钟参数的更新。
(3)第二导航定位信号增设C/A码和军用ME码
2003年开始发射的Block Ⅱ R-M卫星,其第二导航定位信号(L2)将增设C/A码,并在第一、二导航定位信号上各增设一个军用伪噪声码。当用L1-C/A码和L2-C/A码作导航定位时,民间用户将能实现精确实时的电离层改正数,从而提高定位、测速和定时的精度。
在军事上还能进行导弹截击前期预警、航天器速度控制、停航辅助、航路变更和行驶状态改进。
(4)Block Ⅱ F卫星增设第三导航定位信号(L5)
2005年发射的Block Ⅱ F卫星增设了第三民用信号(L5),其载波频率为1176.45MHz。分为载波频道和数据频道,该信号既提供民用,又提供军用。
(5)第四代GPS工作卫星BLOCK Ⅲ
第四代GPS工作卫星BLOCK Ⅲ正在研制中,其目标是能够达到20~50cm的实时定位精度。BLOCK Ⅲ卫星除了具有现行GPS卫星的全部功能以外,还将增强下列作用:维护航空、航天和火车行驶的安全;提供飞机精密着陆导航服务;跟踪货物安全运输;精细农业;城市规划;矿藏开采。
预计将在2010年发射第一颗BLOCK Ⅲ卫星,当GPS Ⅲ卫星全部投入运行后,将改变现行的六轨道24颗GPS Ⅱ/Ⅱ A/Ⅱ R卫星星座的布局和结构,用33颗卫星构建成高椭圆轨道(HEO)和地球静止轨道(GEO)相结合的新型GPS混合星座。将大大改善现有的定位精度和定位速度,使测量工作提高到一个崭新的阶段。