串联PID调节器校正
书籍:新编液压工程手册上册
出处:按学科分类—工业技术 北京理工大学出版社《新编液压工程手册上册》第165页(796字)
多年来,PID调节器一直作为工业控制上的主要串联校正装置获得广泛应用。从控制原理的角度来看,用PID调节器作串联校正是滞后—超前校正的一种特例。
·具有PID调节器校正的控制系统结构图如图5.6-9。
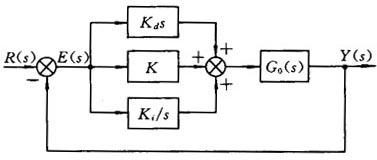
图5.6-9 具有PID调节器校正的系统结构图
·PID调节器的数学模型(见表5.6-4)。
表5.6-4 PID调节器的数学模型
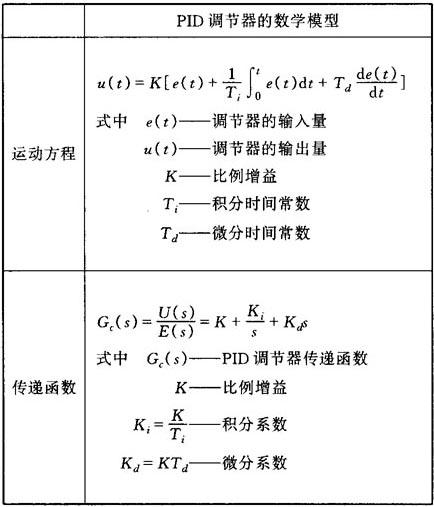
从上述结构图和数学模型看出,一旦确定了K,Ki和Kd这三个参数,PID调节器的形式也就完全确定了。
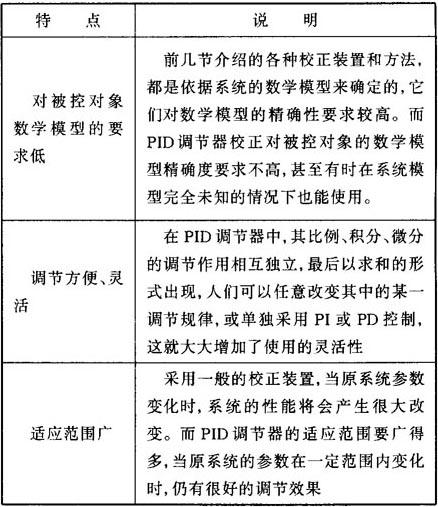
·串联PID调节器校正的特点(见表5.6-5)。
表5.6-5 串联PID调节器校正的特点
(D)使用情况(见表5.6-6)。
表5.6-6 串联PID调节器校正的使用情况
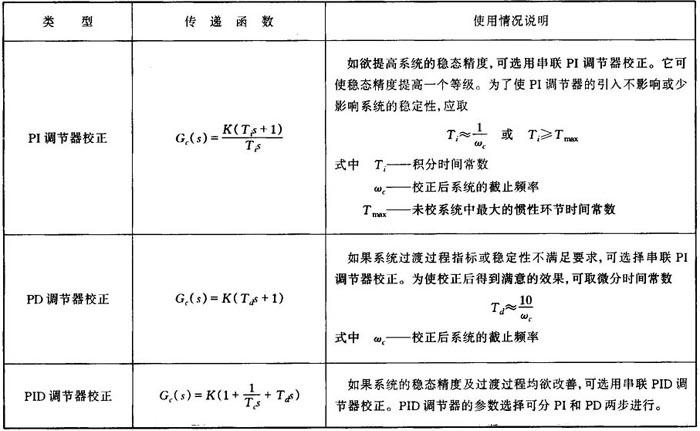
因为PID调节器的比例、积分、微分的调节相互独立,以求和的形式出现,所以一个PID调节器常根据系统要求使用PI、PD或PID。
对采用串联PID调节器校正的实际过程控制系统,其调试过程多是根据阶跃响应曲线用试凑法逐渐调节δ=1/K,Ti,Td的数值,直至响应曲线满意为止。如果已知系统的数学模型,可参考表5.6-6中给出的Ti及Td的选取方法估算出Ti和Td,再进行调试,则可缩短系统的调试过程。