差动连杆机构
书籍:现代综合机械设计手册中
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1852页(1085字)
例5.2-122 单轮刹车均衡机构
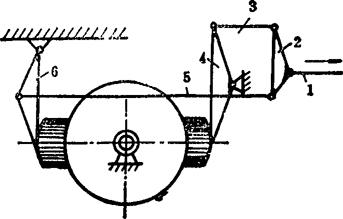
刹车时,将操纵杆1向右拉,通过2-3-4-5-6构成的差动连杆机构,使与杆4、6固连的制动块以同样的速度和均衡的作用力作用于车轮,可避免车轮滚动刹车时受到附加制动力的影响。
例5.2-123 七杆差动连杆机构
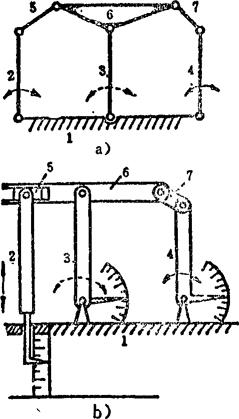
图a)所示的铰链7杆机构,具有两个自由度。若以构件2、4为主动件,则杆3可输出合成运动。若各杆的长度已确定,则3的运动规律取决于主动件2、4的运动。
可用将七杆差动机构的某些转动副改为移动副的方法,构造出多种变型七杆差动机构,图b)即为其中的1例。
例5.2-124 曲柄滑块合成机构
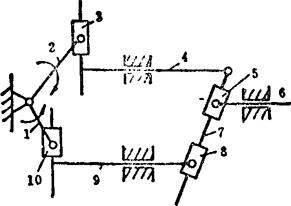
将由2-3-4构成的曲柄移动导杆滑块机构和由1-10-9构成的曲柄移动机构用构件7、8相连系,便构成差动机构。若以移动导杆1、2为主动件,则可通过5由滑杆6输出往复移动。显然,6的运动是两个主动曲柄运动的合成。
例5.2-125 凸轮-连杆差动机构
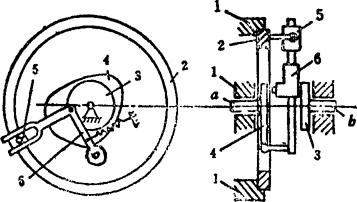
主动轴a固联凸轮4,另一主动轴b固联圆盘3,两主动件通过构件6、滑块5带动从动盘2转动。2的运动为主动轴3、4的合成运动。构件6是凸轮4的直接从动件,用作摆杆与滑叉,构件1为机架。引入凸轮是为了通过设计合理的凸轮廓线来实现输出盘2的复杂运动规律要求。
例5.2-126 轴线位置偏差补偿机构
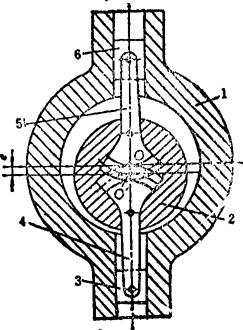
主动轴1的轴心为O,从动轴2的轴心为O′,两轴线的偏差为 。主、从动轴与连杆4、5及滑块3、6组成差动机构。以此为基础,用与4、5分别相固联的两扇形齿轮进行啮合封闭,则构成图示机构。在工作过程中,当轴心O与O′的相对位置发生变化时,借助此机构可自动得到补偿,而不影响两轴的运动传递。该机构可用作非共线轴传动的联轴器。
。主、从动轴与连杆4、5及滑块3、6组成差动机构。以此为基础,用与4、5分别相固联的两扇形齿轮进行啮合封闭,则构成图示机构。在工作过程中,当轴心O与O′的相对位置发生变化时,借助此机构可自动得到补偿,而不影响两轴的运动传递。该机构可用作非共线轴传动的联轴器。
上一篇:其它型间歇机构
下一篇:现代综合机械设计手册中目录