速度瞬心法求速度
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1886页(1657字)
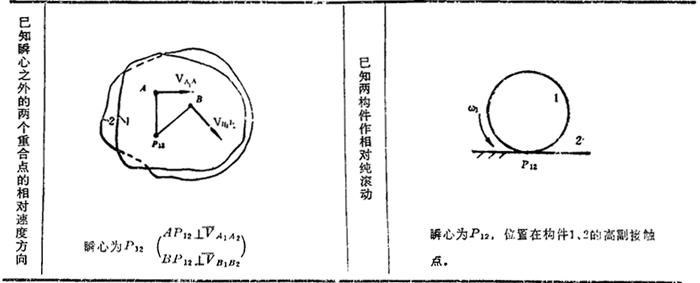
任一瞬时在相互作平面运动的两个构件上,总存在一个绝对速度相等的重合点,该重合点称为速度瞬心,简称瞬心。若该两构件之一静止不动,则其瞬心称为绝对瞬心(两构件在该点的绝对速度等于零);若两构件都在运动,则其瞬心称为相对瞬心(两构件在该点绝对速度相等,但不等于零)。在相互作平面运动的两个构件上,瞬心之外的其它重合点之间一定有相对速度,相对速度的方向一定垂直于该点与瞬心的连线。
设平面机构共含有K个构件(包括机架),因每两个构件之间就有一个瞬心,故该机构的瞬心总数N=K(K-1)/2。
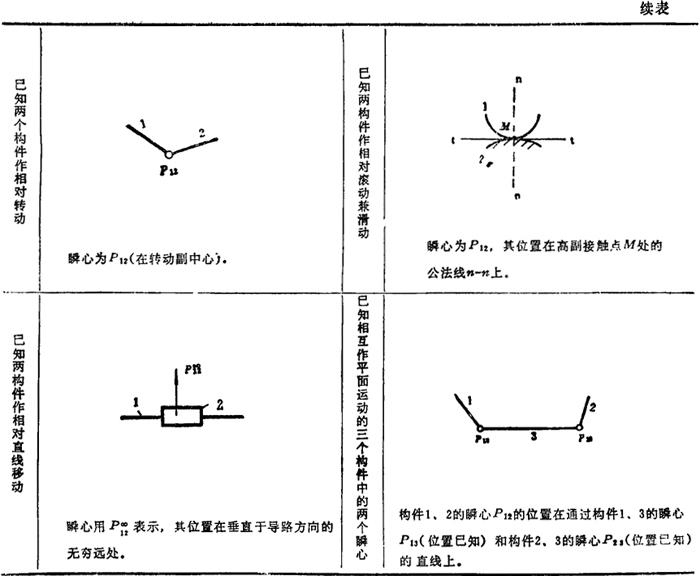
当已知两构件的相对运动时,其瞬心位置的确定方法见表5.3-1。
表5.3-1 瞬心位置的确定
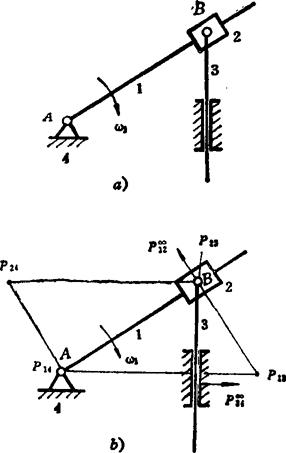
例5.3-3 铰链四杆机构,见图a),已知按 画出的位置图及ω1。求vc、ω2、ω3。
画出的位置图及ω1。求vc、ω2、ω3。
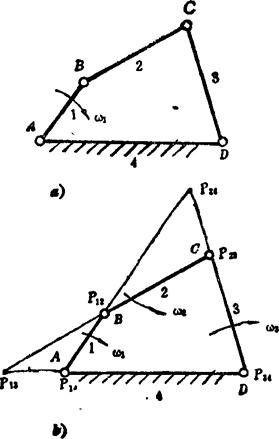
在图b)中找出了全部瞬心。
利用P14、P124P24由ω1求得ω2

利用P13、P14、P34由ω1求得ω3

利用P24、P23由ω2求得vC:
vC=P24P23μ1ω2(m/s)
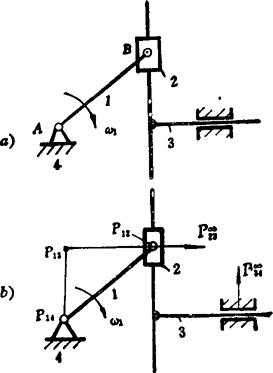
例5.3-4 曲柄滑块机构,见图a),已知按 画出的位置图及ω1。求v3、ω2。
画出的位置图及ω1。求v3、ω2。
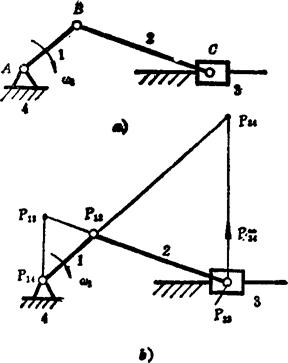
瞬心位置见图b)。求解结果为:

v3=P14P13μ1ω1(m/s)
例5.3-5 正切机构,见图a)。已知按μ1画出的位置图及ω1,求v3。
瞬心位置见图b)。求解结果为:
v3=P14P13μ1ω1(m/s)
例5.3-6 正弦机构,见图a)。已知按μ1画出的位置图及ω1,求v3。
瞬心位置见图b)。求解结果为:
v3=P14P13μ1ω1(m/s)
例5.3-7 凸轮机构,见图a),已知按μ1画出的位置图及ω1,求v2。
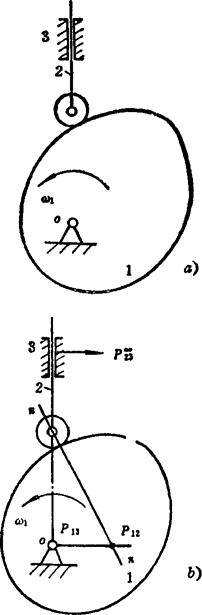
瞬心位置见图b),求解结果为:
v2=P12P13ω1(m/s)
例5.3-8 牛头刨床机构,见图a)。已知按μ1画出的位置图及ω1,求v3。
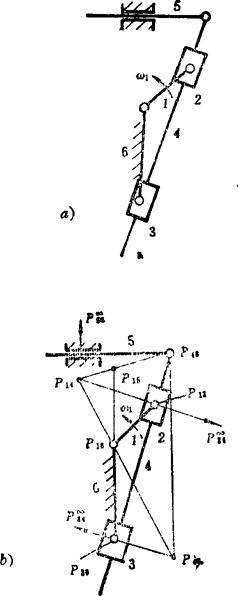
瞬心位置见图b)。本机构共有16个瞬心,求15需利用P16、P15、P66(其中P56、P16可直接找出);找P15需利用P16、P56(可直接找出)以及P45、P14(其中P45可直接找出);找P14需利用P12、P24(可直接找出)以及P15、P45(P15已找出);找P45需利用P45、P56(已找出)以及P34、P25(可直接找出)。其结果:
v5=P16P15μ1ω1(m/s)