空间RSSP四杆机构
书籍:现代综合机械设计手册中
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1948页(700字)
将图5.5-11中从动杆3与机架4组成的转动副换成移动副,并令h3=0,便得到如图5.5-14所示的的RSSP机构。这是最简单的空间曲柄滑块机构。此时,由于X3轴可取得与X4轴平行,所以θ3=0°,而s3成为运动变量,表示滑块3的输出位移。
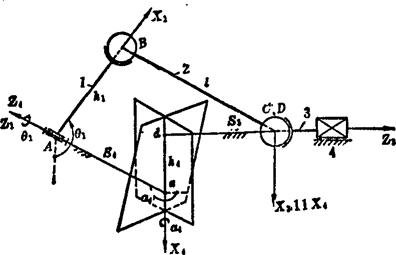
图5.5-14 RSSP机构
图示空间RSSP机构的输出输入位移方程式可由式(5.5-3)得出。将h3=0和θ3=0代入该式,经整理后可写出求输出位移s3的二次方程式为: -2Es3+F=0 (5.5-10)
-2Es3+F=0 (5.5-10)
由式(5.5-10)求解可得输出位移s3的计算公式如下:

式中标识符M=+1或-1,可按该机构的装配方案和滑块运动连续性进行选择。
将式(5.5-10)对时间求导,并令 ,
, ,可得出求解滑块速度v3的公式为
,可得出求解滑块速度v3的公式为

若令v3=0,可得滑块处于极限位置时的输入输出位移关系式为

将式(5.5-13)对时间求导,对主动杆1作等速转动的情况,有 ,故可求得滑块移动加速度的公式为
,故可求得滑块移动加速度的公式为

上一篇:空间RSSR四杆机构
下一篇:现代综合机械设计手册中目录