空间RSSR四杆机构
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1945页(3312字)
图5.5-11所示为含有首末两个转动副和两个中间球面副的空间RSSR四杆机构。杆4为机架。由于主动杆1通常为曲柄,而从动杆3多数为摇杆,故也常称其为空间曲柄摇杆机构。由于连杆2具有绕本身轴线转动的局部自由度,运动不确定而不便利用,所以对该机构进行运动的分析,主要是求出从动杆转角随主动杆转角而变化的运动关系。这里采用比较简便的“拆杆法”,即设想将连杆2拆离进行分析。
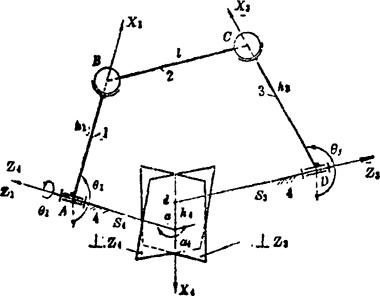
图5.5-11 空间RSSR四杆机构
用矩阵坐标变换法研究机构时,为了把机构的运动转化为坐标系间的变换,在需要分析运动的杆件上均固结有各自的坐标系。图中,与机架4、主动杆1及从动杆3分别固结有坐标系a-X4(Y4)Z4、A-X1(Y1)Z1、及D-X3(Y3)Z3。拆离的连杆2,则不设置坐标系。为了图面清晰,图中只标出各坐标系中的X轴和Z轴。实际上,只要确定了X轴和Z轴,按右手法则,Y轴也随即确定下来。
坐标系的选择原则,主要是应能满足进行坐标变换的要求。通常是先选定各个Z轴,然后沿每两个相邻Z轴的最短距离线(即公垂线)标出各个X轴。图中,Z1轴和Z3轴分别选取沿主动杆1和从动杆3的转动轴线,而与机架4相固结的Z4轴则取其与Z1轴相重合(也可取得与Z3轴相重合);X1轴与过球面副中心B所作Z1轴的垂线相重合;X3轴与过球面副中心C所作Z3轴的垂线相重合;X4轴则选在Z3和Z4两轴线的公垂线方向,确定各杆的固定坐标系后,可得机构的几何常量参数和运动变量参数如下:
h1=AB——主动杆长度,由A至B的距离,与X1轴正方向一致时取为正值;
l=BC——连杆长度;
h3=DC——从动杆长度,由D至C的距离,与X3轴正方向一致时取为正值;
h4=da——机架长度,由d至a的距离,与X4轴正方向一致时取为正值;
s3=dD——确定从动杆轴向位置由d至D的距离,与Z3轴正方向一致时取为正值;
s4=aA——确定主动杆轴向位置由a至A的距离,与Z4轴正方向一致时取为正值;
a4——机架角度,对着X4轴观察,绕X4轴,由Z3轴逆时针方向量至Z4轴为正;
θ1——主动杆的转角,即输入角,对着Z4轴观察,绕Z4轴,由X4轴逆时针方向量至X1轴为正;
θ3——从动杆的转角,即输出角,对着Z3轴观察,绕Z3轴,由X4轴逆时针方向量至x3轴为正。
采用拆杆法,设想将连杆2拆离时,其余的构件组成开式运动链。从动杆3也和主动杆1-样,能对机架4自由转动。应用不共原点的坐标变换关系,可以写出B、C两点在参考坐标系a-X4(Y4)Z4中的时变坐标。
就坐标系a-X4(Y4)Z4和A-X1(Y1)Z1而言,由于B点在A-X1(Y1)Z1中的坐标为〔h1,0,0〕T,而坐标系的变换路线为
故可写出矩阵变换坐标关系式为

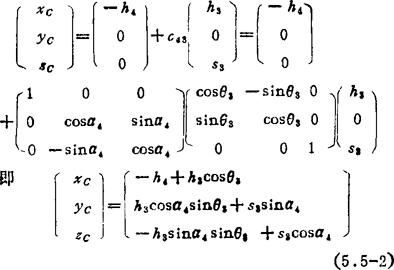
就坐标系a-X4(Y4)Z4和D-X3(Y3)Z3而言,由于C点在D-X3(Y3)Z3中的坐标为〔h3,0,0〕T,而坐标系的变换路线为
故可写出矩阵变换坐标关系式为
从拆离的连杆2考虑,不管连杆如何运动,B、C两点间的距离始终保持定长l。在实际机构中,由于主动杆的B点和从动杆的C点都是通过球副用定长的连杆相连的,机构运动时,B、C两点的时变坐标要受到连杆定长的约束。因此,设想拆离连杆2后,机构运动仍应保持下列几何等同关系式:

将式(5.5-1)及(5.5-2)代入并展开整理,可得机构的输出输入方程式:
为了求解输出角θ2,可将上式写成如下形式的三角方程式

式中系数A、F、C与机构的常量参数和输入角有如下关系:
为了便于用代数法求解θ3,再令x=tg(θ3/2),于是有sinθ3=2x/(1+x2),cosθ3=(1-x2)/(1+x2),从而式(5.5-4)可化成下列二次方程式:
(B-C)x2-2Ax(B+C)=0
解出x得

式中 标识符M=±1,表示给定θ1时,θ3可有两个值(这与用图解法求解时可有两个交点相当)。M=十1或-1,应该根据所给机构的装配方案或从动杆运动连续性选定。一般来说,符号M只需一次选定,在以后的连续计算中不改变。
将式(5.5-4)对时间求导一次,并令dθ1/dt=ω1和dθ3/dt=ω3,经过整理后可得:

如果从动杆3有瞬时速度为零的极限位置存在,则在上式中令ω3=0,可得从动杆3处于极限位置时输入角和输出角之间的关系式为,

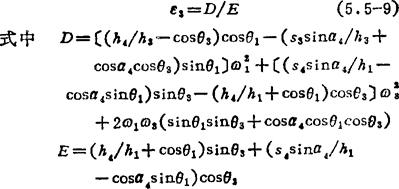
将式(5.5-7)对时间求导一次,并考虑到主动杆作等速转动,即ε1=dω1/dt=0,可得从动杆的角加速度公式为:
例5.5-1 在图5.5-12所示空间RSSR机构中,主动杆AB、连杆BC和从动杆CD的长度分别为250mm、1100mm和550mm。主动杆和从动杆的转轴垂直交错,它们的转动平面和两轴之间的相互尺寸为l1=l2=700mm及l3=350mm。设主动杆AB以等角速度ω1=100rad/s转动时,要求对该机构从动摇杆CD作运动分析。
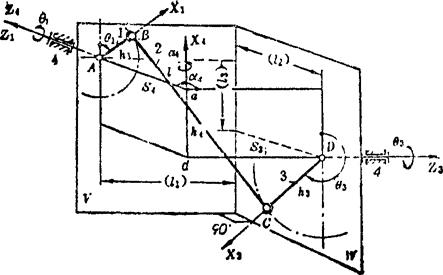
图5.5-12 空间RSSR机构
解:在图示RSSR机构中标注坐标系,并对应图5.5-11比较可知:h1=250mm。l1=1100mm,h3=550mm,h4=350mm,S3=S4=700mm,a4=90°,ω1=100rad/s。将以上已知结构参数和运动参数分别代入式(5.5-5)、(5.5-6)、(5.5-7)、(5.5-9),取M=-1,经过编程计算,可解得从动摇杆CD的角位移θ3、角速度ω3、及角加速度ε3。各运动参数对应主动曲柄AB不同位置时的具体数值见表5.5-1。绘制成的运动曲线如图5.5-13所示。
表5.5-1
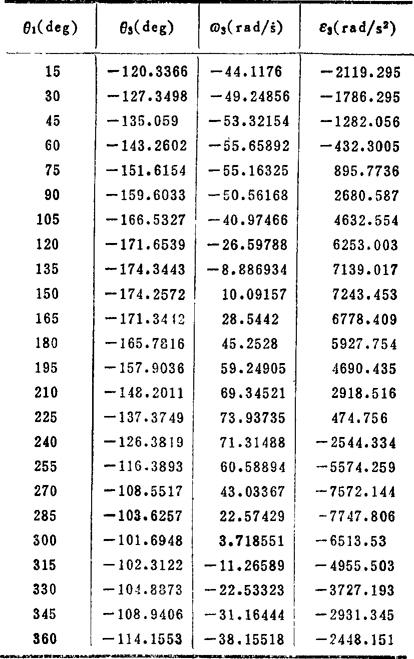
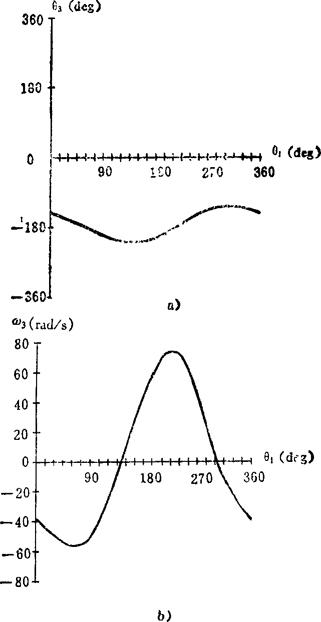
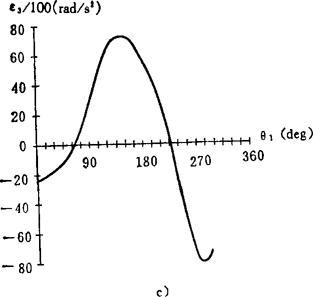
图5.5-13 运动曲线