机器人操作手的组成
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第2069页(940字)
工业机器人是通过编程能自动完成一定操作或移动作业的多功能操作机,以代替人的劳动。工业机器人一般由操作手、驱动系统和控制系统组成,如图5.13-1所示。
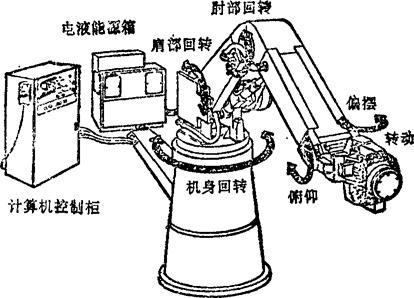
图5.13-1 工业机器人的组成
操作手是工业机器人的本体,包含有手部(夹持器)、腕部、臂部、机身和行走部等。
驱动系统有液压式、气动式、电机式和混合式几类。其中,液压式的特点是输出力大、体积小、传动平稳。气压式的装置特点是结构简单,易于维修,且防火、防爆性好,但响应慢,工作平稳性较差,控制精度不高。电机式驱动装置常采用直流伺服电机、交流伺服电机、步进电机等,其特点是操纵简单,响应快,易于控制,精度高,但由于电机转速高,需有减速装置,因而相应增大了操作手的体积和重量,结构复杂,且减速器的机械误差也将带入操作手系统,降低了系统的精度。由电-液或电-气组成的混合驱动方式,其特点是可发挥各自优点,能简化系统,故应用较多。
机器人操作手的每个动作,如手指开闭,手腕上下、左右摆动和回转,手臂上下移动、伸缩和回转,以及各个动作的位移、速度和加速度等,由控制系统按预定的程序进行指挥。其控制方式,可分为分散控制与集中控制两种。若按所控制的运动轨迹,则可分为点位控制和连续控制两类。
分散控制方式,是前一程序动作执行完毕,直接发回控制下一程序动作开始的信号,依次进行控制。而集中控制方式,则为每一个程序动作执行完毕,均发回一信号给控制器,由控制器发出下一个程序动作的指令,以进行控制。前者具有结构简单、维护方便、价格便宜等优点。常用来控制动作不多且较为简单的专用机械手。而对于动作较多且复杂的机器人操作手,则以选用后者为宜。
点位控制方式的特点是,只要求控制操作手的手部从一点到另一点的位移,不要求控制移动过程的轨迹。而连续控制是依照连续运动的轨迹进行控制,在整个移动过程都要求处在控制之下。