手部机构——夹持器
书籍:现代综合机械设计手册中
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第2071页(335字)
机器人操作手的手部是重要的执行机构——用来直接夹持工件或握持工具的部件、由于被夹持工件的形状、尺寸、材质及表面状态不同,以及选用的夹持方式和机构的不同,手部的结构也多种多样。大部分手部结构是根据被夹持工件的特定要求而专门设计的。常用的手部按其夹持原理的不同,可以分为夹持和吸附两类。夹持类如图5.13-3所示,按其夹持方式,可分为外夹式(a)、内撑式(b)、勾托式(c)、弹簧式(d)几种。吸附类如图5.13-4所示,按吸附方式可分为气吸式(a)和磁吸式(b)。
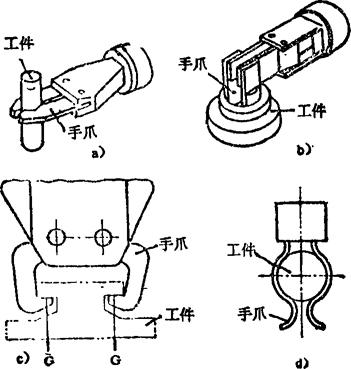
图5.13-3 夹持类手部
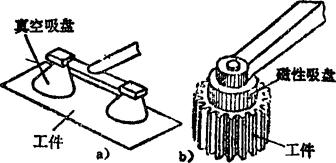
图5.13-4 吸附类手部
上一篇:夹持类手部
下一篇:现代综合机械设计手册中目录