夹持类手部
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第2071页(2652字)
手指的指端,是直接与工件接触的部位,其结构、形状取决于工件的形状和夹持要求。常用的指端形状如图5.13-5所示。图a)所示为V型指,适用于夹持圆柱形工件,特点是夹紧可靠、定中心好。也可用两个滚轮代替V型指的两个工作面,如图b)所示,使被夹持的工件可以绕自身中心轴作旋转运动。图c)、d)、i)所示为平面型指,适用于夹持方形(或具有两个平行表面)工件或细小棒料。图e)所示为尖型和薄、长型指,适用于夹持小型或柔性工件,以及要求夹紧力不大的场合,或夹持位于狭窄工作空间的细小工件,以避免和周围物体相碰。图f)、g)、h)所示为特型指,对于不规则形状的工件,必须按照工件的形状和夹持要求设计相适应的专用手指,如齿型指等。
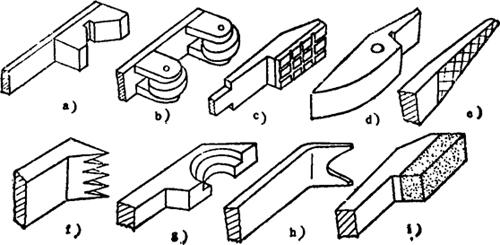
图5.13-5 指端的形状
手指的指面,根据工件被夹持部位的表面质量和材质软硬的不同,可有几种型式:1.平整光滑的光滑指面,可用以夹持工件的已加工表面,保护其表面不受损伤;2.有齿纹的齿纹指面,可用以夹持表面粗糙的毛坯或半成品,增大摩擦力,确保夹紧工件;3.包有橡胶、塑料或石棉等材料的柔性指面,以保护工件被夹持的表面,常用于夹持薄壁和脆性工件,或高温及有特殊夹持要求的工件。
手部的夹持机构,大致可分为转动型和平移型两大类。其中,转动型夹持机构有如下几种方式:
① 图5.13-6所示为单作用斜楔杠杆式夹持机构。主动斜楔1向下运动,克服弹簧5的拉力,使手指7绕销轴6转动,从而夹紧工件8。斜楔向上运动,在弹簧力作用下,使手指反转松开工件。斜楔与手指通过滚子3接触,可以减少摩擦力,提高机械效率。

图5.13-6 斜楔杠杆式夹持机构
② 图5.13-7所示为滑槽杠杆式。手指4的指端装有V型指5,另一端开有长滑槽。当主动杆1连同固定在其上的圆柱销2向上运动时,通过滑槽的作用,使手指绕销轴3转动,从而夹紧工件6。反之主动杆1向下运动时松开工件。

图5.13-7 滑槽杠杆式夹持机构
③ 图5.13-8所示为连杆杠杆式。当主动杆2向下运动时,通过连杆4推动手指6绕销轴7转动,夹紧工件9,反之,主动杆2向上运动时松开工件。

图5.13-8 连杆杠杆式夹持机构
④ 图5.13-9中a)所示为齿条齿轮杠杆式。主动杆1末端加工成齿条2,与扇形齿轮4相啮合。当杆1向上运动时,通过齿条齿轮啮合传动,带动与扇形齿轮相固结的手指5绕销轴3转动,夹紧工件7。反之,主动杆1向下运动时松开工件。图b)为具有中间齿轮的传动机构,其作用是改变手指的转动方向,实现主动杆向下推动时夹紧工件。采用气缸驱动时,可使活塞的无杆端工作,以增大输出的夹紧力。

图5.13-9 齿条齿轮杠杆式夹持机构
⑤ 图5.13-10所示为内撑连杆杠杆式。内撑式的夹持方向和外夹式相反。其结构形式与外夹式相似,仅是把手指的夹持面反装,并使手指伸入工件孔内,以手指的外表面对工件内壁撑紧而夹持工件。为使定位准确,一般采用三点定位。因此,常用于三指型手部。

图5.13-10 内撑连杆杠杆式夹持机构
⑥ 图5.13-11所示为弹簧杠杆式。当夹持器向下运动,手指1碰到工件时,工件对手指产生反作用力P,通过杠杆作用压缩弹簧4,将手指撑开。工件进入手指中间后,由压缩弹簧4的反力夹紧工件。这类夹持器不需要外加驱动力,结构简单。但弹簧手指本身不能自动松开工件,需要有外力夹紧工件后,夹持器向上运动才能使手指再次撑开并脱离工件.由于弹簧产生的夹紧力有限,故只适用于夹持轻小工件。

图5.13-11 弹簧杠杆式夹持机构
⑦ 图5.13-12所示为钩托式。它也是由连杆机构组成的,其主要特点是不靠夹紧力夹持工件,而是用手指对工件的钩、托等动作托持工件。应用钩托方式可降低对驱动力的要求、简化手部结构。这种机构适用于低速、搬运大型工件。在图a)中,驱动气缸的活塞杆1推动杠杆手指2、3(通过齿轮啮合)各自绕销轴O转动,使手指闭合到托持工件位置。手指与工件的接触点均在转动中心O1、O2的外侧,从而工件本身的重量不会使手指自行松脱。图b)是连杆杠杆机构的钩托式手部示意,如图示位置,在工件重力G的作用下,连杆机构处于死点,具有自锁作用,手指在无外力作用时不会松开工件。
平移型夹持机构有如下两类:

图5.13-12 钩托式手部
① 平行四边形机构。图5.13-13所示为几种常见的平移型夹持机构简图,它们的共同点是都采用平行四边形的铰链四杆机构,以实现手指的平移;而不同点在于分别采用齿条齿轮、蜗杆蜗轮和连杆滑槽的传动方式。这种机构铰链和构件较多,加工和装配的精度要求高,传动效率较低。

图5.13-13 平行四边形夹持机构
② 直线移动机构。能实现直线往复移动的机构很多,图5.13-14所示是常用的两种。图a)中,当齿轮1转动时,通过与手指2、3的齿条啮合传动,使手指作直线往复移动,以夹紧或松开工件。图b)是内撑式手部,斜楔1向下运动时,推动手指2、3向外移动,从而撑紧工件。反之,斜楔向上运动,通过与其固结在一起的斜面4的作用,使手指向内收缩,以放松工件。手指也可做成三指或多指式。

图5.13-14 直线移动夹持机构