稳定裕量
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册上》第398页(1219字)
图1.9-33所示是开环幅相频率特性曲线对(-1,j0)点的位置与对应的系统单位阶跃响应示意图。图中各系统的开环传递函数在右半S平面的极点数P皆为零。由图可见,当开环幅相曲线包围(-1,j0)点时,对应的系统单位阶跃响应h(t)发散,系统不稳定;当开环幅相曲线通过(-1,j0)点时,对应的系统单位阶跃响应h(t)呈等幅振荡;当开环幅相曲线不包围(-1,j0)点时,系统稳定。但由图(c)、(d)可知,开环幅相曲线距(-1,j0)点的远近程度不同,系统的稳定程度也不同。开环幅相曲线距(-1,j0)点越远,闭环系统稳定的程度愈高。通常以稳定裕量来表示系统的稳定程度。系统的稳定裕量(也称稳定裕度或稳定余量)包括幅值裕量和相角裕量。

图1.9-33 系统的相对稳定性
幅值裕量(增益裕量)的定义:
相位为-180°的频率(ωg)的幅值|G(jωg)H(jωg)|的倒数,用kg表示,即

kg的,物理意义是如果系统的开环增益再增大kg倍,则系统处于临界稳定状态。
相角裕量的定义:

上式的φ(ωc)是开环频率特性的幅值|G(jωc)H(jωc)|=1时的相角,一般为负值。相角裕量的物理意义是,如果φ(ωc)再滞后γc时,系统就处可临界稳定状态。
图1.9-34所示为在开环幅相图上表示的系统的幅值裕量和相角裕量。在该图与式(1.9-33)和(1.9-34)中,ωc和ωg分别称为幅值穿越频率和相角穿越频率。
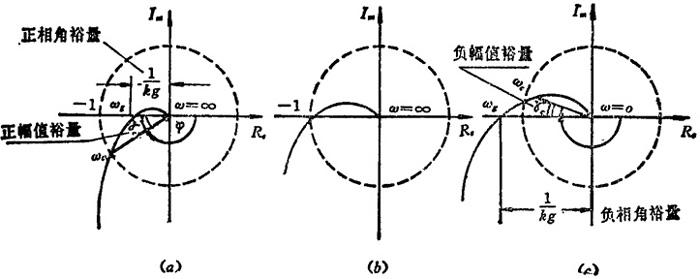
图1.9-34 在开环幅相图上表示的稳定裕量
幅值裕量和相角裕量也可以在对数坐标图上表示,如图1.9-35所示。在对数坐标图中,幅值裕量kg的分贝值为
相角裕量为 γc=180°+φ(ωc)

图1.9-35 在开环对数坐标图上表示的稳定裕量
对于最小相位系统(1),当幅值裕量kg(dB),相角裕量γe均为正值时,系统是稳定的。图1.9-34和1.9-35中图(a)所示的系统是稳定的,图(b)、(c)所示的系统是不稳定的。系统的稳定裕量过大会使系统响应变慢。经验证明,当取kg=(10~20)dB,γo=40°~60°时,系统的综合性能较好。