闭环(半闭环)数控伺服系统
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册下》第2907页(15966字)
5.2.1 鉴相式伺服系统
将鉴相式伺服系统可分为两种类别。一种是图8.5-105所示的鉴相式伺服系统,其测量元件为旋转变压器或感应同步器,执行元件是宽调速直流电机,基准信号发生器一方面控制脉冲调相器,将进给脉冲按一定比例转换成相位的变化,另一方面经励磁线路产生旋转变压器(感应同步器)所需的激磁信号。整形线路将旋转变压器输出的正弦信号变成方波信号,以便与脉冲调相器输出的信号形式相同。鉴相器检测两个同频率输入信号的相位误差(代表机床移动部件实际移动量与进给脉冲要求的移动量之差),产生与此误差成正比的电压输出,经直流放大器驱动可控硅驱动线路,再由可控硅驱动线路驱动宽调速直流电机带动工作台移动。另一种是如图8.5-106所示的鉴相式伺服系统,以光栅作为测量元件,液压马达作为执行元件。光栅的输出信号经鉴相倍频后进入数字相位变换器,把代表工作台实际位移的数字脉冲信号转换成与基准信号成一定相位差的方波信号。进给脉冲经数字相位变换器(脉冲调相器)也变成与基准信号成一定相位差的方波信号。两路方波信号进入鉴相器,并在其中进行比较,将差值以电压形式输出。输出的电压信号经直流放大控制电液伺服阀,驱动液压马达,带动工作台移动。
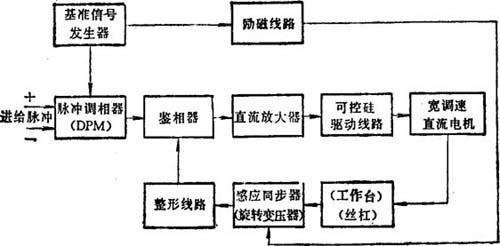
图8.5-105 以旋转变压器或感应同步器为测量元件的鉴相式伺服系统框图

图8.5-106 以光栅为测量元件的鉴相式伺服系统框图
鉴相式伺服系统的主要控制线路包括脉冲调相器、鉴相器和整形线路。图8.5-107所示为脉冲调相器。图中标准计数器和x计数器的容量为N。若输入计数器脉冲的频率为f,则计数器最后一级输出计数器输出信号的相位滞后于标准计数器Φ=360°/N·Δx,如图c)所示。
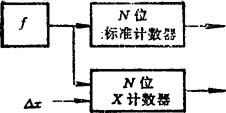
图8.5-107 脉冲调相器
图8.5-109所示是由D触发器和与非门1、2组成频率为f/N。如图8.5-108所示,如果在向两计数器输入计数脉冲之前先向x计数器输入一定数量脉冲Δx,则N个计数脉冲使标准计数器的输出变化一个周期(360°),N+Δx个脉冲使x计数器的输出变化一个周期(360°)后又变化 Φ= ·Δx,即超前标准计数器一个相位Φ,见图a),图b)所示为输入计数脉冲的过程中向x计数器送入一定数量附加脉冲+Δx前、后的波形。若在向两计数器输入计数脉冲的过程中,向x计数器送一定数量的-Δx脉冲(抵消Δx个进入x计数器的脉冲),则x的可逆电路,可用来向两个计数器输入计数脉冲过程由另外通道加入一定的±Δx脉冲。过程是先将基准信号发生器输出的标准时钟脉冲CP分解为fA、fB、fD、fE,其波形如图8.5一110所示。fD、fE与FB同步,频率为FA、FB的二分之一,FA、FD、FE互不重叠。利用FA作为时钟信号,一方面触发标准计数器,另一方面经可逆电路的与非门1和与非门2触发x计数器,使进给脉冲±Δx与FE同步,将+Δx经与非门2与x计数器相接,实现使x计数器多计Δx个数;将-Δx接于D触发器的清零端,-Δx使D触发器的Q输出端在FB的两个脉冲之间变为低电平,封住与非门1,阻止一个FA脉冲通过,使x计数器少计一个数。
·Δx,即超前标准计数器一个相位Φ,见图a),图b)所示为输入计数脉冲的过程中向x计数器送入一定数量附加脉冲+Δx前、后的波形。若在向两计数器输入计数脉冲的过程中,向x计数器送一定数量的-Δx脉冲(抵消Δx个进入x计数器的脉冲),则x的可逆电路,可用来向两个计数器输入计数脉冲过程由另外通道加入一定的±Δx脉冲。过程是先将基准信号发生器输出的标准时钟脉冲CP分解为fA、fB、fD、fE,其波形如图8.5一110所示。fD、fE与FB同步,频率为FA、FB的二分之一,FA、FD、FE互不重叠。利用FA作为时钟信号,一方面触发标准计数器,另一方面经可逆电路的与非门1和与非门2触发x计数器,使进给脉冲±Δx与FE同步,将+Δx经与非门2与x计数器相接,实现使x计数器多计Δx个数;将-Δx接于D触发器的清零端,-Δx使D触发器的Q输出端在FB的两个脉冲之间变为低电平,封住与非门1,阻止一个FA脉冲通过,使x计数器少计一个数。

图8.5-108 输入+Δx、-Δx后的波形
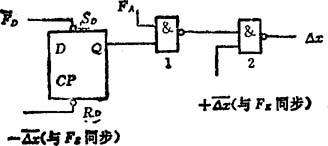
图8.5-109 可逆电路
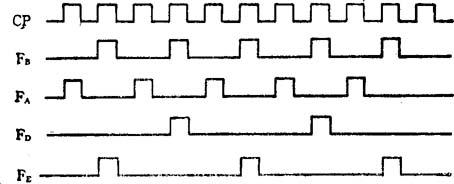
图8.5-110 fA、fB、fD、fE波形
常用的鉴相器,有二极管鉴相器、门电路鉴相器。二极管鉴相器适用于两正弦波相位的鉴别,由二极管、变压器等元件组成,如图8.5-111所示。参予比较的信号从2EB、2Ex端输入,在二极管V1、V2、V3、V4中有电流i1、i2、is、i4流过。直流电压从电位计R经分压输出。流过电阻R的总电流I=(i1+i3)-(i2+i4)。流过二极管的电流可以表示为
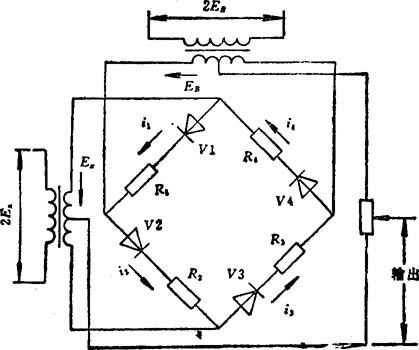
图8.5-111 二极管鉴相器
i=Q0+Q1U+Q2U2
式中 U——二极管的端电压;
Q0、Q1、Q2——系数。
如图所示方向,各二极管的端电压分别为
U1=-Ex-EB;
U2=-Ex+EB;
U3=Ex+EB:
U4=Ex-EB。
故有 i1=Q0+Q1(-Ex-EB)+Q2(-Ex-EB)2
i2=Q。+Q1(EB-Ex)+Q2(EB-Ex)2
is=Q0+Q1(EB+Ex)+Q2(EB+Ex)2
i4=Q0+Q1(Ex-EB)+Q2(Ex-EB)2
I=(i1+i3)-(i2+i4)=8QzExEB
设两输入信号是相位差为Φ的正弦信号,即
Ex=exsin(ωt+Φ)
EB=eBsin(ωt)
则二极管鉴相器输出电流的平均值为
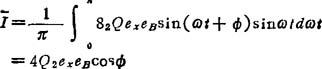
输出的有效电压
 =
= =4Q2exeBRcosΦ
=4Q2exeBRcosΦ
可见,输出电压U为两输入信号相位差的余弦函数。当Φ=π/2时, =0,定义此点为系统的平衡点,在该点工作台的实际位移与指令位移相等,此点也称为机床的瞬时零点。当Φ在此点附近变化时,可近似认为
=0,定义此点为系统的平衡点,在该点工作台的实际位移与指令位移相等,此点也称为机床的瞬时零点。当Φ在此点附近变化时,可近似认为 与Φ成线性关系。这种鉴相器可在0<Φ<180°的范围内使用。
与Φ成线性关系。这种鉴相器可在0<Φ<180°的范围内使用。
门电路鉴相器适用于两方波的相位鉴别,由触发器和门电路组成。鉴相器输出脉冲信号的宽度,代表了进行鉴相的两数字脉冲信号的相位差.鉴相器的输出需经滤波、整流,将脉冲信号按宽度变为直流信号,该功能通常由平均网络实现.图8.5-112所示是最简单的门电路鉴相器,主要由触发器组成。指令信号和位置反馈信号分别与D触发器的置“1”端和清“0”端相接,如果两信号相差180°,则在输出端得到对称的方波,经滤波后得到2.5V的直流电压,这时系统处于平衡状态,对应于机床的工作零点。当位置反馈信号与指令信号相位差大于180°时,在输出端得到非对称方波,方波信号高电平的时间大于低电平,经滤波后得到大于2.5V的直流电压。反之,得到小于2.5V的直流电压。使用这种鉴相器,必须保证在机床瞬时零点时的指令信号与位置反馈信号的相位差为180°.图8.5-113所示是由半加器组成的鉴相器,其输出为S=A +
+ B,其中A、B分别为指令信号和位置反馈信号的二分频信号。当指令信号和位置反馈信号的相位相等时,S为零。位置反馈信号超前或滞后指令信号某一相位角Φ时,由S端输出方波的平均电压正比于Φ。误差符号由信号F鉴别。当位置反馈信号超前指令信号时、F被置“1”,反之被置“0”。由于信号经过-级分频,所以使鉴相器的检测范围增加到±360°。
B,其中A、B分别为指令信号和位置反馈信号的二分频信号。当指令信号和位置反馈信号的相位相等时,S为零。位置反馈信号超前或滞后指令信号某一相位角Φ时,由S端输出方波的平均电压正比于Φ。误差符号由信号F鉴别。当位置反馈信号超前指令信号时、F被置“1”,反之被置“0”。由于信号经过-级分频,所以使鉴相器的检测范围增加到±360°。
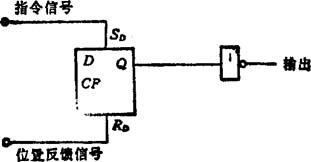
图8.5-112 门电路鉴相器
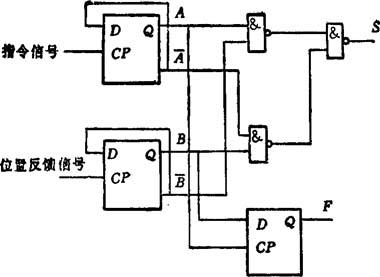
图8.5-113 半加器鉴相器
当测量元件为旋转变压器或感应同步器时,需将方波形式的基准信号转换成正、余弦信号,以便激励测量元件。若调相器的输出为方波,则需将测量元件输出的正弦信号转换成同频率的方波,以便进入鉴相器进行鉴相;如果测量元件输出的正弦波直接输送鉴相器,则需将调相器输出的方波转换成同频率的正弦波。将正弦信号转换为方波可采用电压比较器。电压比较器的型号按输入信号的强弱和对输出信号的要求选择。将方波转换为正弦信号可采用RC选频放大器,如图8.5-114所示。实质上,这是带负反馈的选频放大器,其放大倍数K可以表示为

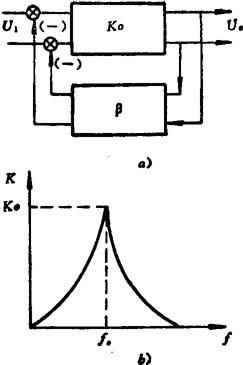
图8.5-114 RC选频放大器原理图b)所示为频率特性,经放大基波,抑制谐波,从而得到正弦波输出。若需余弦信号,可将正弦信号经RC移相产生。
5.2.2 鉴幅式伺服系统
鉴幅式伺服系统如图8.5-115所示,由测量元件及信号处理线路、比较器、数模转换、放大环节及执行元件等部分组成。测量元件及信号处理线路中,包括测量元件、解调电路、电压频率转换器和sin/cos发生器。可用于鉴幅式伺服系统的测量元件,有旋转变压器和感应同步器。测量元件的输出电压信号为UB=Umsin(α-θ)sin t。其中θ为丝杠转角,α为测量元件激磁信号的电气角,幅值Umsin(α-θ)代表工作台的位移。该正弦信号经解调,即滤波、放大、检波、整流以后,变成方向与工作台移动方向相对应、幅值与工作台位移成正比的直流电压信号。该直流电压信号经电压频率转换器变成计数脉冲,脉冲的个数与电压幅值成正比,其方向用符号触发器表示。计数脉冲一方面经sin/cos发生器产生驱动测量元件的两路信号sin和cos(方波信号),另一方面送至比较器与进给脉冲进行比较。比较器的输出为零,说明工作台的实际移动距离与指令信号要求工作台移动的距离相等,执行元件停止带动工作台移动;比较器的输出不为零,表明工作台的实际移动距离不等于指令信号要求工作台移动的距离,执行元件将带动工作台移动,直到比较器输出为零时停止。比较器输出的数字量由数模转换电路转化为直流电压信号,并经放大环节放大,驱动执行元件带动工作台移动。
t。其中θ为丝杠转角,α为测量元件激磁信号的电气角,幅值Umsin(α-θ)代表工作台的位移。该正弦信号经解调,即滤波、放大、检波、整流以后,变成方向与工作台移动方向相对应、幅值与工作台位移成正比的直流电压信号。该直流电压信号经电压频率转换器变成计数脉冲,脉冲的个数与电压幅值成正比,其方向用符号触发器表示。计数脉冲一方面经sin/cos发生器产生驱动测量元件的两路信号sin和cos(方波信号),另一方面送至比较器与进给脉冲进行比较。比较器的输出为零,说明工作台的实际移动距离与指令信号要求工作台移动的距离相等,执行元件停止带动工作台移动;比较器的输出不为零,表明工作台的实际移动距离不等于指令信号要求工作台移动的距离,执行元件将带动工作台移动,直到比较器输出为零时停止。比较器输出的数字量由数模转换电路转化为直流电压信号,并经放大环节放大,驱动执行元件带动工作台移动。
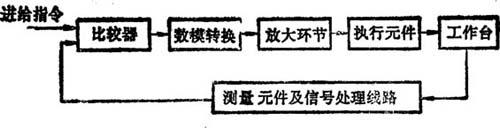
图8.5-115 鉴幅式直流伺服系统框图
可以看出,在鉴幅式伺服系统中,测量元件(旋转变压器和感应同步器)是以鉴幅式工作状态工作的,比较器所比较的是数字脉冲信号,两数字脉冲信号可直接在比较器中进行脉冲数量的比较,而不需要基准信号。
测量元件及信号处理线路中的解调线路,由低通滤波器、放大器和检波器三部分组成。由于测量元件的激磁信号sin/cos是方波信号,因此,在测量元件的输出中,除基波(UB=Umsin(α-θ)sinωt)外,还有高次谐波,需经低通滤波器将其滤掉,如如8.5-116所示。其中,电位计W用来调节解调线路的灵敏度,放大器用来提高输出阻抗,以便得到良好的阻抗匹配。低通滤波器的输出经一级放大后输送到检波器。检波器的原理线路如图8.5-117所示,它是带放大器和反相器的电子开关线路。输入信号Ud=UDsin(α-θ)sinωt经放大器OA1、反相器OA2和RC线路变成两列相位相反的交变电压信号。参考信号是与Ud同频率、同相位的方波信号。当参考信号D为高时,控制电子开关K1接通,此时 为低,控制电子开关K2断开;参考信号D为低时,控制电子开关K1断开,此时D为高,控制电子开关K2接通。检波器波形如图8.5-118所示。如果参考信号D在sinωt为正时为高,则工作台正向进给时,检波器的输出Ue为正,见图a);工作台反向进给时,输出Ua为负,见图b)。再经过一次滤波去掉脉动成分,便得到平滑的直流电压Uf。
为低,控制电子开关K2断开;参考信号D为低时,控制电子开关K1断开,此时D为高,控制电子开关K2接通。检波器波形如图8.5-118所示。如果参考信号D在sinωt为正时为高,则工作台正向进给时,检波器的输出Ue为正,见图a);工作台反向进给时,输出Ua为负,见图b)。再经过一次滤波去掉脉动成分,便得到平滑的直流电压Uf。
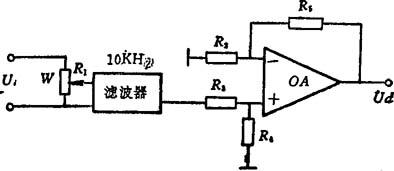
图8.5-116 低通滤波器
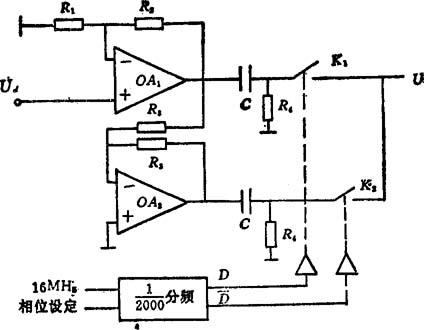
图8.5-117 检波器原理线路

图8.5-118 检波器波形
图8.5-119所示为电压频率转换器工作原理。其作用是将输入的电压值转变为相应的脉冲。放大器OA1为积分器,输入信号大,积分时间长,输入信号小,积分时间短。放大器OA2和OA3为比较器,分别将其输入信号与+2.5V和-2.5V比较。同步器如图8.5-120所示,由二个D触发器组成。当输入信号由高向低跳变时,同步器将输出一个与CP脉冲同步的负脉冲。当Uf从零变为正值时(工作台正向进给),OA1进行正向积分。一旦OA1的输出达到+2.5V,比较器OA2的输出便由高变为低,同步器产生一个同步脉冲。该同步脉冲一方面反映工作台的实际位移,另一方面使三极管V1导通,进而场效应管V2导通,使积分器OA1的输出与输入连在-起,将输出拉回到Uf的水平,使OA2的输出恢复到高电平。OA2输出低水平时,将符号寄存器置“1”, 端输出为零,表示正方向进给。Uf为负,工作台负向进给,OA3工作,其工作过程与正向进给相似,只是在OA3输出低电平时符号寄存器的
端输出为零,表示正方向进给。Uf为负,工作台负向进给,OA3工作,其工作过程与正向进给相似,只是在OA3输出低电平时符号寄存器的 端输出为“1”,表示负向进给。电压频率转换器的工作波形如图8.5-121所示。
端输出为“1”,表示负向进给。电压频率转换器的工作波形如图8.5-121所示。
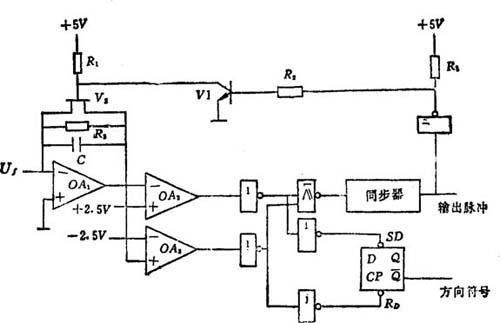
图8.5-119 电压频率转换器工作原理

图8.5-120 同步器原理线路
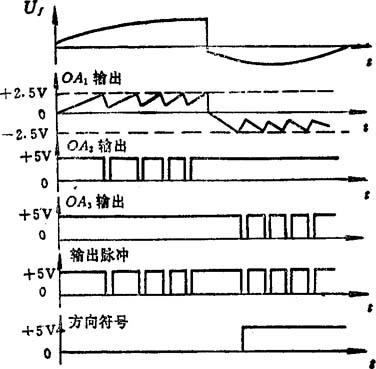
图8.5-121 电压频率转换器工作波形
sin/cos信号发生器的输入为电压频率转换器输出的脉冲,输出为测量元件的激磁信号Us=Umsinαsin t和UA=Umcosαsinωf,其中α由输入脉冲的多少和方向决定,频率根据要求由基准信号的频率和计数器的位数予以调整和控制。如图8.5-122所示。
t和UA=Umcosαsinωf,其中α由输入脉冲的多少和方向决定,频率根据要求由基准信号的频率和计数器的位数予以调整和控制。如图8.5-122所示。
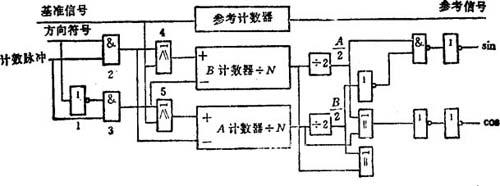
图8.5-122 sin/cos信号发生器sin/cos信号发生器分为脉冲相位转换线路和sin/cos信号生成线路两部分,主要由计数器和门电路组成。在sin/cos信号发生器工作过程中,应保证基准信号与计数脉冲不同步。当sin/cos信号发生器接收到正向计数脉冲时,在方向符号控制下,A计数器多加这些正向脉冲,使其输出超前参考计数器输出一个相位角α1;同时B计数器减掉这些正向脉冲,使其输出滞后参考计数器输出一个相位角α1。sin/cos信号
发生器接收到反向计数脉冲时,情况与上述相反。在没有接收到脉冲的情况下,A、B计数器的输出与参考计数器的输出同相位。sin/cos信号发生器的输出为

图8.5-123所示为sin/cos信号发生器的工作波形,其输出为两路周期性的方波信号。如果计数器的容量为N,基准信号的频率为f,则输出的两路方波的频率为f/(2·N)。若输入sin/cos信号发生器x个正向脉冲,则输出的sin和cos信号方波的宽度分别为4xπ/N和π/2-4xπ/N。将sin和cos信号用付里叶级数展开,其基波分量为

图8.5-123 sin/cos信号发生器工作波形
Us=Umsin sin
sin t
t

令α= ,则有
,则有
Us=Umsinαsin t
t
UK=Umcosαsin t
t
比较器对指令脉冲信号和反馈脉冲信号进行比较。根据指令脉冲的形式,比较器的线路稍有不同,如图8.5-124所示。其中,图a)的指令信号形式为一条线路传递进给脉冲,一条线路传递进给方向;图b)中的指令信号形式为一条线路传递正向进给脉冲,一条线路传递反向进给脉冲。可逆计数器的内容即为指令信号和反馈信号的差值。当指令信号由一个方向向另一个方向转换时,可逆计数器中的内容一定在变成零后再进行,即工作台停止后再换向,否则会造成加工误差。

图8.5-124 比较器原理线路
5.2.3 数字比较式伺服系统
数字比较式伺服系统的组成如图8.5-125所示。
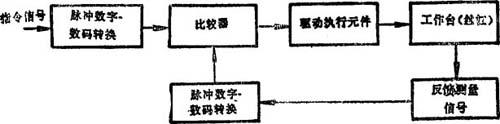
图8.5-125 数字比较式伺服系统的组成
常用的测量元件有光栅和编码盘,前者提供的是数字脉冲信号,后者提供的是数码信号。也可采用感应同步器和旋转变压器等作为测量元件,但需增加模数转换环节,故较少采用。常用的数字比较器有数码比较器、数字脉冲比较器以及数码与数字脉冲比较器三种类型。当指令信号和反馈信号中,一个是数字脉冲形式,一个是数码形式,采用数码比较器或数字脉冲比较器进行比较,需在指令与比较器之间或反馈与比较器之间增加“脉冲数字—数码转换”线路。比较器的输出为指令信号与反馈信号的差值及差值的方向,此信号经放大后用于控制执行元件。执行元件可以是伺服电机或液压伺服马达。
数字脉冲转换为数码,可采用可逆计数器。可逆计数器对输入脉冲进行计数,以数码值输出。若需将数码转换为数字脉冲,可采用数字脉冲乘法器,把输入的二进制数码转变为等值的脉冲个数。也可用由减法计数器组成的线路将数码转为数字脉冲。如图8.5-126所示,将需转换的数码置入减法计数器,在时钟脉冲CP作用下,使计数器作减法计数,同时通过与门输出。直至计数器减到“0”,将与门关闭。显然,输出的脉冲数与计数器中的数码等值。

图8.5-126 数码转换为数字脉冲的原理线路
在数字比较系统中,按其功能可将比较器分为两类。一类是数字脉冲比较器(参见图8.5-124)另一类是数码比较器,用以对两个数码信号进行比较。数码比较器可以用并行加法器组成,对两路输入A和B通过补码(或反码)相加的方法进行比较,即A-B。这种数码比较器可采用二进制加法,也可采用二一十进制加法。图8.5-127所示为采用反码运算的二进制比较器。其中,图a)由四个反向器和四个全加器组成,可对小于16的数进行比较。因为是用反码进行减法运算,所以采用了循环进位。图b)为两组比较器并联的情况,可对小于256的数进行比较。如果进行比较的数更大,可进行多组并联。增加“如果负则变反”环节,以使比较器的输出总为原码。
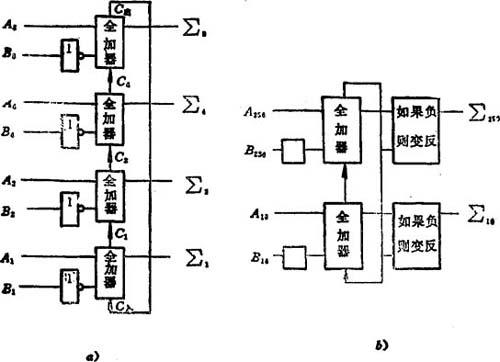
图8.5-127 采用反码运算的二进制比较器
5.2.4 直流伺服电机调速系统
图8.5-128所示为直流伺服电机载荷周期曲线(图中曲线由电机温度极限确定)。该曲线的使用方法是:先根据实际的负载转矩由下式求得电动机在该时的过载倍数


图8.5-128 直流伺服电机载荷周期曲线
再在载荷曲线的水平轴找到实际机械所要求的过载时间tR,并从该点作水平轴的垂线与所要求的Tmd曲线相交,从该交点作水平线与纵轴的交点就为允许的加载周期比d,即

式中 tR为伺服电机的工作时间;tF为电机的断电时间。伺服电机的最短断电时间可由下式求得:

图8.5-129所示为转矩—速度特性曲线。由温度极限线、换向极限线、瞬时换向极限线、转矩极限线和速度极限线分割为三个区。第Ⅰ区为连续工作区,在该区域内速度和转矩的任何组合都可长时间连续工作而不损坏。第Ⅱ区为断续工作区,在该区域内电机只能根据载荷周期曲线(参见图8.5-128)所决定的导通时间(允许工作时间)和“断电”时间间断工作。第Ⅲ区为加速和减速区,在该区域内伺服电机只能进行瞬时加、减速。

图8.5-129 直流伺服电机转矩—速度特性曲线
与伺服电机性能有关的参数如下:
①转子惯量Jm(kg·cm2)。
②静摩擦转矩Tf。指伺服电机在不带任何负载、断电的情况下,刚能转动转子的转矩。
③最大理论加速度 max。理论加速度是最大转矩和电机转子惯量的函数。静态最大理论加速度可用下式计算:
max。理论加速度是最大转矩和电机转子惯量的函数。静态最大理论加速度可用下式计算:

式中 Im为允许的最大电流(A);Kt为转矩常数;Jm为电机转子惯量(kg·cm2);系数0.9是考虑到由于电枢饱和将使电机最大转矩减小而设的。
④反电势常数KVe是当电枢在磁场中被其它机械拖动按规定速度转动时所产生的电压值。此常数反映了永磁磁场强度,单位为V·s/rad或V/(r·min-1),其间的关系为V/(r·min-1)=9.55V·s/rad。
⑤电枢直流电阻。用Ra(无电刷),Rm(有电刷)表示。
⑥电枢电感La。
⑦转矩常数Kte也称为转矩灵敏度,用每安培电流所产生的转矩表示(N·m/A)。
⑧电气时间常数ta。是电枢电流上升初始变化率的函数,定义为电流达到额定稳定值的63.2%时所需时间,可由下式计算:

⑨机械时间常数tm。是速度上升初始变化率的函数,定义为当施加一阶跃电压时电机速度达到整个速度的63.2%所需的时间,可按下式计算:

⑩热时间常数tt。是电机在额定电流时绕组温度上升初始变化率的函数,定义为达到整个温升的63.2%时所需的时间。
⑾阻尼常数F0。是指电机转动时,使电枢电路短路在电机中产生的反转矩,是速度的函数。可由下式计算:

阻尼常数的倒数KD(KD=1/F0)为一速度调节常数,也称为速度—转矩曲线斜率。可表示为n=n0-KDT。其中,n为在不同负载下的电机转速;n0为电机的空载转速;T为负载转矩。
⑿最大允许电流Im。是指不使永磁场去磁的加到电机的最大峰值电流。若超过此电流值,即使仅是一个脉冲,也将使磁钢产生不可逆的去磁。
除上述参数外,还有连续额定转矩Ts、最大绕组温升θm、最高允许转速等参数。
选择直流伺服电机时,应正确计算加在电机轴的阻尼转矩和转动惯量,其值应满足以下各条件:
①当机械作空载运行时,在整个速度范围内加在电机轴的负载转矩,应在转矩—速度特性曲线的第Ⅰ区域内。
②最大负载转矩、加载周期比、过载时间都应在允许的范围内。
③电机在加速或减速过程中的全部转矩,应在转矩—速度特性曲线的第Ⅲ区域内。
④对于频繁起、制动的负载以及周期性变化的负载,应使其在一个周期内的电机转矩均方根值小于连续转矩。
⑤应使负载惯量小于或等于电机惯量。否则将对电机的灵敏度和整个伺服系统的精度产生影响。
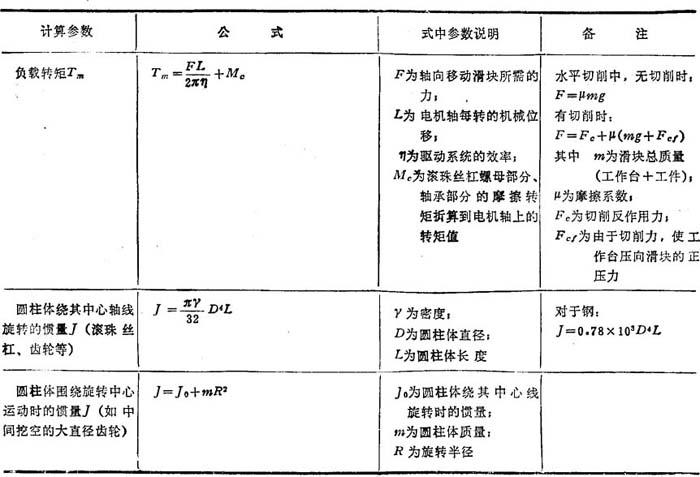
常用的负载转矩和负载惯量计算公式见表8.5-22。
表8.5-22 常用负载转矩和负载惯量计算公式


FANUC(日本)、SIEMENS(德国)和A-B(美国)产直流伺服电机系列分别见表8.5-23~8.5-25。
表8.5-23 FANUC系列直流电机
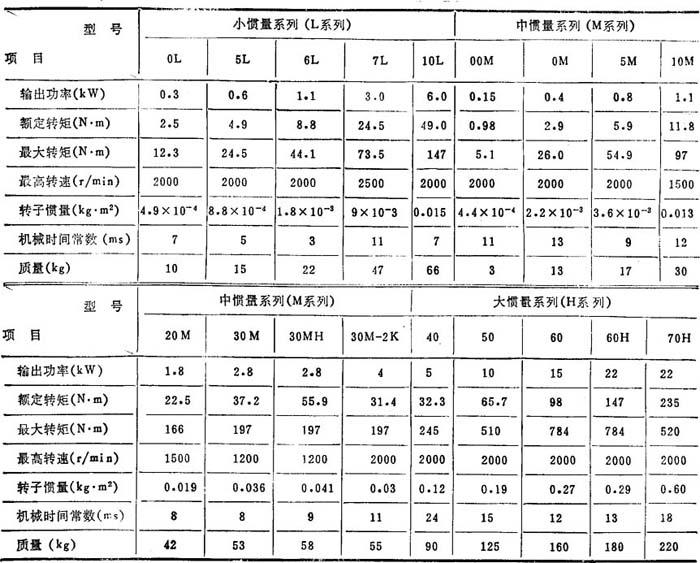
表8.5-24 SIEMENS的IHU系列电机

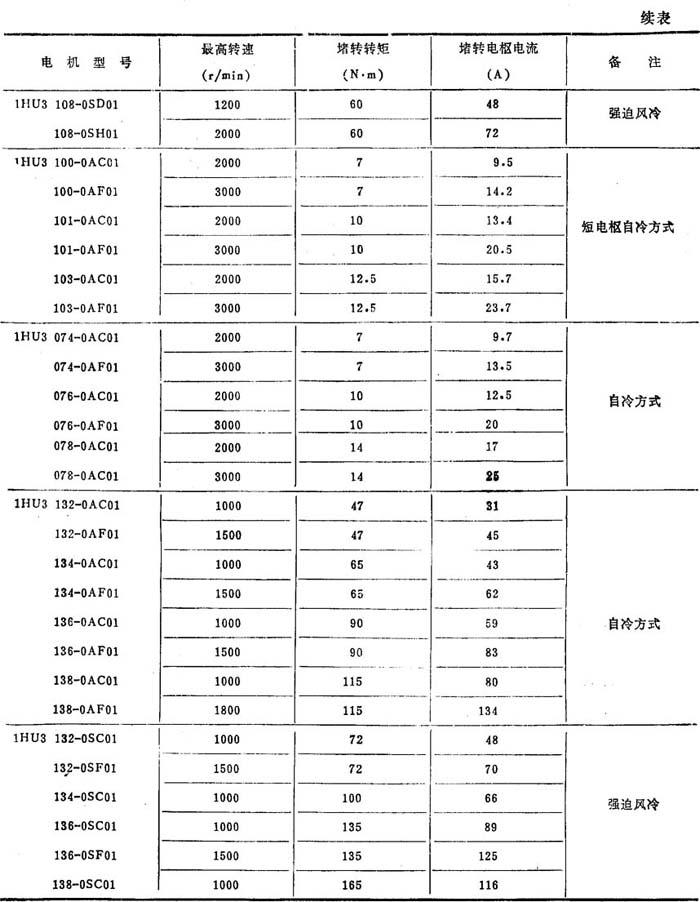
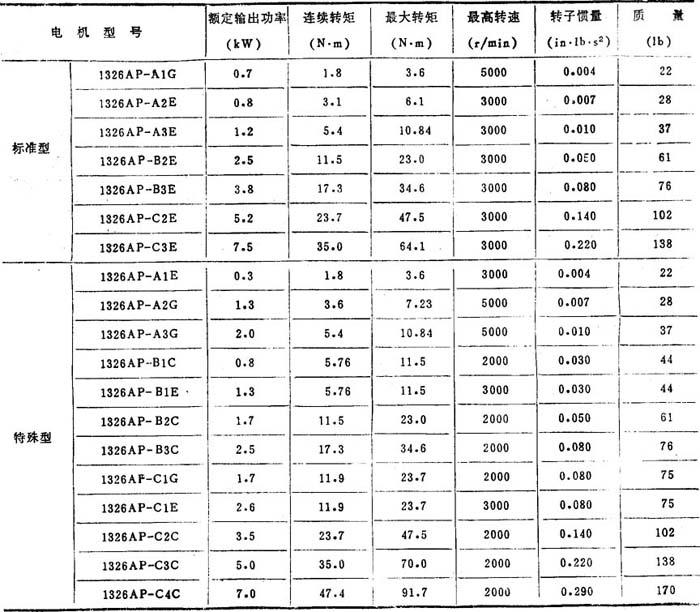
表8.5-25 A-B的1326系列直流电机
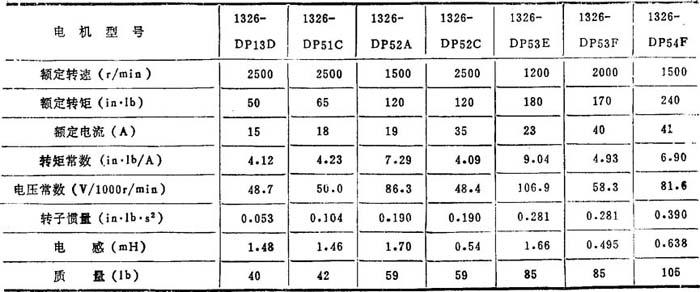
注:1in=0.0254m;11b=0.45359kg;1in·Ib·s2=0.11298kg·m2。
直流伺服电机调速系统,主要有可控硅整流—直流电动机(SCR-D)和晶体管脉宽调制—电动机(PWM-D)两种。由于PWM-D系统具有功耗低、快速响应好和运行平稳等优点而得到较多应用。PWM-D系统是利用大功率晶体管的开关作用,将直流电压转换成频率约为2kH7方波电压后,加到直流电动机的电枢,通过对方波脉冲宽度的控制,以改变电枢的平均电压,从而改变电机的转速的。如图8.5-130所示,直流电压U经频率开关K加到电动机的电枢。若K的开闭周期为T,每次闭合的时间为τ,则导通率δr=τ/T,电枢两端的平均电压为
Ud=δTU。当T不变(即频率固定),只需改变导通时间τ,就可改变电枢两端的平均电压,从而改变电机转速。
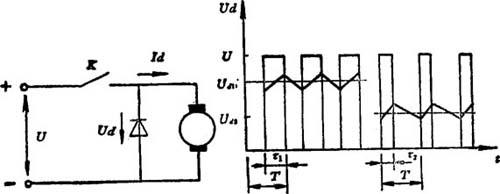
图8.5-130 脉宽调制示意图
脉宽调制方式有可逆和不可逆两种。可逆的脉宽调制方式常采用如图8.5-131所示的主电路。当对晶体管V1、V3基极施加一定宽度的控制脉冲时,V1、V3间断导通,电机正转,改变控制脉冲宽度,即可改变转速。当对晶体管V2、V4基极施加控制脉冲时,V2、V4间断导通,电机反转。可以同时对四只三极管基极施加控制脉冲信号,通过不同的组合来提供正、负和零电枢电压。桥路中的二极管主要用来对三极管进行反压保护。
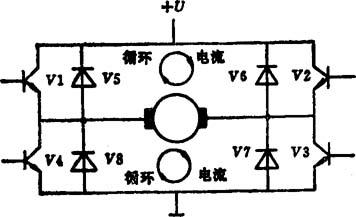
图8.5-131 桥式功率放大器原理
PWM-D系统的控制回路原理如图8.5-132所示。它由以下几部分组成:

图8.5-132 PWM-D系统控制回路原理框图
①速度控制环。其主体电路为一比例积分运算放大器,通过调节比例增益和积分时间常数来调整系统的稳定性及响应速度。速度指令信号和速度反馈信号在控制环中进行比较,其差值经放大输给电压环。控制环还接收电流极限电路的电压信号。当实际电流大于电流极限值时,便有一电压值输入,产生电流极限负反馈,使输出限于电流极限值。
②电压控制环。其主体电路为积分运算放大器。电压指令值与电枢电压反馈值(负反馈)相加,经积分放大,输出脉宽指令信号。速度环输出的电压指令值的变化,改变了电压环输出的脉宽指令,从而可使电枢的平均电压发生变化。由于采用积分运算放大器,使输出的转速无静差,因而改善了零速附近的特性,有效地消除了系统的非线性。
③三角波发生器。产生一定频率、一定峰值电压的三角波。该三角波确定功率放大器的开关频率,并作为产生脉宽信号的比较基础。
④功率桥开关逻辑线路。其作用是把脉宽指令的模拟信号转换成逻辑信号,以控制功率三极管的开关。如图8.5-133所示,脉冲宽度指令PWC与三角波在运算放大器中相减,输出LD逻辑信号,在另一运算放大器中相加,输出RD逻辑信号。PWC幅值的大小改变了LD和RD逻辑的时间间隔。图中给出了PWC为33%和66%时的LD和RD波形。逻辑信号LD用来开关左半桥的V1、V4,RD用来开关右半桥的V2、V3(见图8.5-131)。其逻辑如下:
V1=LD;V2=RD; V4= ;V3=
;V3=
LD的逻辑保证了V1、V4不能同时导通,RD的逻辑保证了V2、V3不能同时导通,从而避免了电源的短路。V1、V3导通,电枢加正电压,此时有:
V1·V3=LD· D,V2、V4导通,电枢加负电压,有:V2,V4=RD·
D,V2、V4导通,电枢加负电压,有:V2,V4=RD· 。停车时,电枢在上半桥(或下半桥)形成环流,其逻辑为:
。停车时,电枢在上半桥(或下半桥)形成环流,其逻辑为:
V1·V2+V3·V4=LD-RD+L ·R
·R
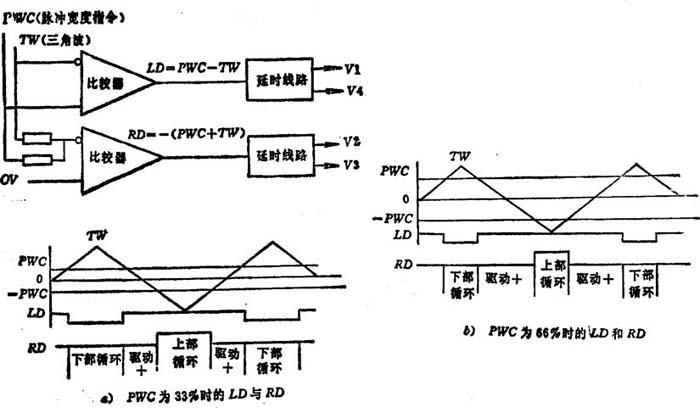
图8.5-133 功率桥开关逻辑控制原理
图中的延时线路保证了两臂间断开一臂和接通另一臂之间的延时,这是为防止电源短路的又一措施。
⑤故障检测线路。用以检测功率桥上部两臂中功率三极管的电流是否超过预定值(约两倍峰值电流)。若超过,则向功率桥开关逻辑线路输入一禁止信号(逻辑“0”),使其紧急停车。
⑥禁止线路。共有三个输入端,其中两个由用户提供(其中一个经过延时),第三个来自故障检测线路。有禁止信号时,使功率桥的各臂断开,电枢电流尽快降至零,而且一直保持零状态。直至禁止信号被撤销,才能重新启动电机。
⑦电压指令钳位线路。有禁止指令时,输出的禁止信号(低电平)使速度调节器输出的电压信号钳位在“0”伏。这样,即使有速度指令输入,也不会有输出产生。
FANUC、SIEMENS和A-B产的直流速度控制单元分别见表8.5-26~8.5-28。
表8.5-26 FANUC直流速度控制单元
表8.5-27 SIEMENS直流速度控制单元(6RB系列)

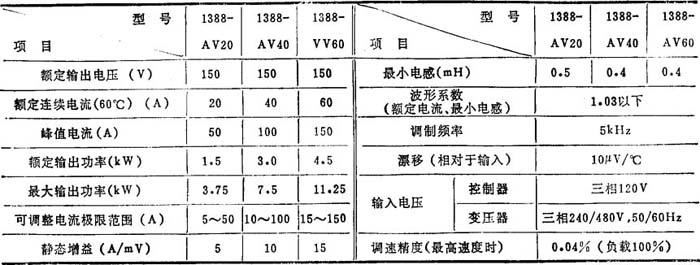
表8.5-28 A-B直流速度控制单元(A-B1388系列)
5.2.5 交流伺服电机调速系统
交流电机的种类和特点见表8.5-29。在数控机床的进给驱动中,多数采用交流永磁式同步电机。它与交流电磁式同步电机相比,具有结构简单、运行可靠、效率较高等特点。其效率也高于异步电机。但交流永磁式同步电机的缺点是,体积较大,起动特性欠佳。如果采取一定的措施,如采用高剩磁感应、高矫顽力的稀土类磁铁等,可比直流电机的重量约减轻60%,外形尺寸约减小1/2。转子转动惯量约减小4/5。
表8.5-29 交流电机的种类和特直

交流永磁式同步电机的转矩—速度特性曲线如图8.5-134所示。图中连续工作极限线是在供给电机的电流为理想的正弦波,且电机工作在某一特定温度下得到的。断续工作极限线通常受电机供电电压的限制。由图可见,这种电机的机械特性比较硬。断续工作区的范围比较大。尤其在高速区,这将有利于电机加、减速能力的提高。
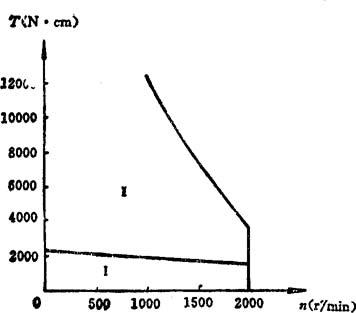
图8.5-134 交流永磁式同步电机的转矩—速度特性曲线
Ⅰ-连续工作区;Ⅱ-断续工作区
FANUC、SIEMENS和A-B产交流伺服电机分别见表8.5-30~8.5-35。
表8.5-30 FANUC交流伺服电机(S系列)
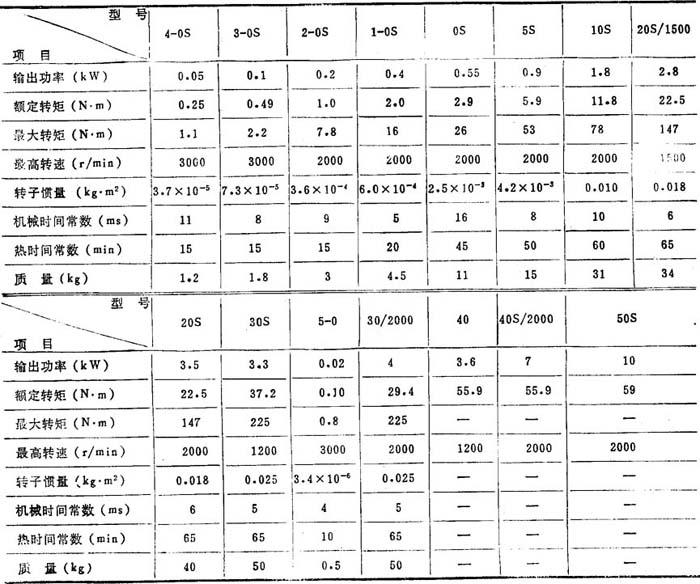
表8.5-31 FANUC交流伺服电机(L系列)

表8.5-32 FANUC交流伺服电机(SP系列)
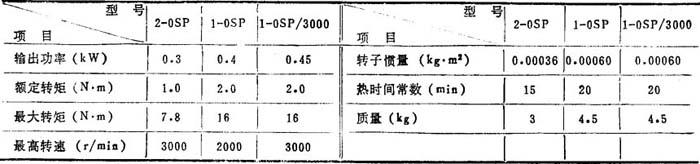
表8.5-33 FANUC交流伺服电机(T系列)
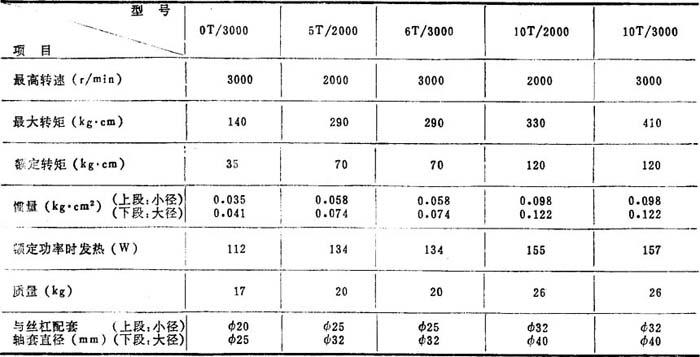
注:1kg·cm=9.80665X10-2N·m。
表8.5-34 SIEMENS交流伺服电机(1FT5系列)
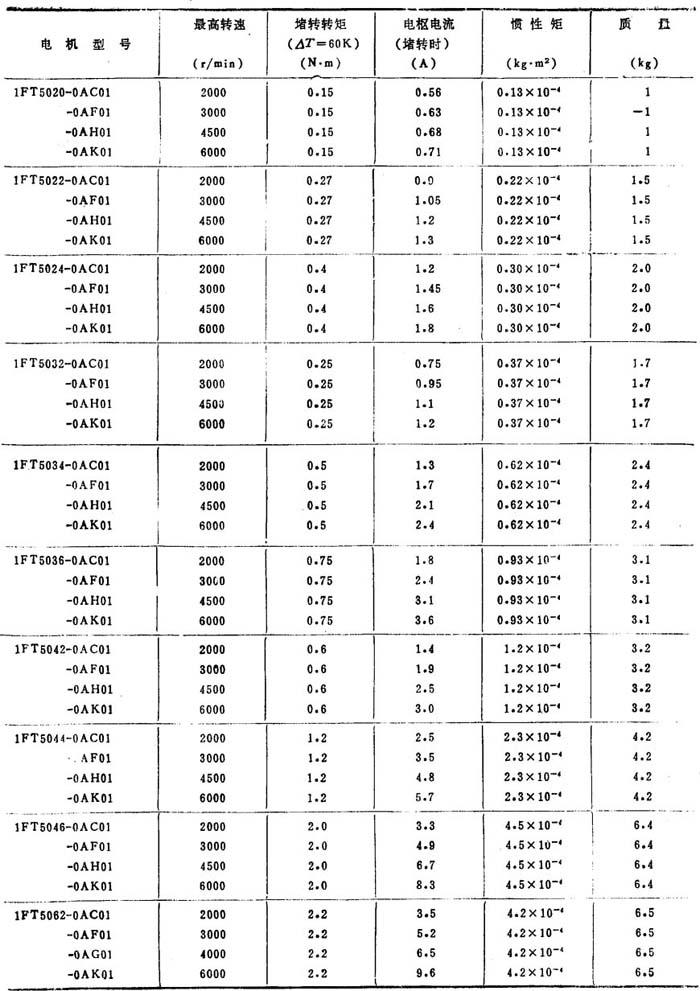

表8.5-35 A-B交流伺服电机
注:1in·1b·s2=0.11298kg·m2。
由于交流永磁式同步电机的转速与电网供电频率有严格关系,因此采用变频方法调速。又由于同步电机无自起动能力,所以,其起动需采用降低起动频率的方法。且同步电机可以方便的实现无级调速。对交流永磁式同步电机的调速控制,可以采用不同的方法:
①自同步控制变频调速。在这种调速控制中,变频器的输出频率由电机轴本身的转速控制,就是使定子电流频率跟随转子的转速而变化。电机的电磁转矩由定子电流和转子磁场的大小决定。如果将转子作为参考轴系,则可把定子看成是直流电机的换向器。因此,这类电机也称无换向器电机。根据供给的变频器电源结构的不同,无换向器电机分为直流式和交流式两类。直流式无换向器电机的调速系统由同步电机和晶闸管的电流逆变器组成,调速控制部分由电流环和速度环组成双环调速系统。此外,还包括四象限运行控制。交流式无换向器电机调速系统由同步电机和频率变换器组成,频率变换器为18只晶闸管组成的交—交变频器。这种调速系统因所用的晶闸管多,成本高,故很少使用。
②电流控制变频调速。永磁式同步电机定子三相绕组中的电流分别为;ia=Isinθr;ia=Isin(θr-120°);ic=Isin(θr+120°)。其中θr为电机的旋转位置。当气隙磁通呈正弦分布时,三相绕组的电流所产生的转矩与各绕组位置的磁通量及绕组电流成正比,因此电机的总转矩为
T=K〔iaΦsinθr+ibΦsin(θr-120°)+icΦsin(θr+120°)= KIΦ (8.5-117)
KIΦ (8.5-117)
式中 K为比例系数;Φ为有效磁通(Wb);I为电流幅值。可见,转矩不随旋转位置而变,它在磁通量恒定的情况下与电流幅值成比例。电流控制调速系统的原理如图8.5-135所示,也由速度环和电流环组成。速度反馈信号与速度指令比较,经速度控制输出与电流幅值指令I*成比例的转矩指令 ,在交流指令发生器中进行I*与对应旋转位置θ,的单位正弦波的乘法运算,输出交流电流指令
,在交流指令发生器中进行I*与对应旋转位置θ,的单位正弦波的乘法运算,输出交流电流指令 、
、 ,经电流控制得到电压指令
,经电流控制得到电压指令 、
、 ,
, ,
, +
+ +
+ =0得出。然后,经PWM控制确定与各相电压相对应的逆变器开关状态。
=0得出。然后,经PWM控制确定与各相电压相对应的逆变器开关状态。
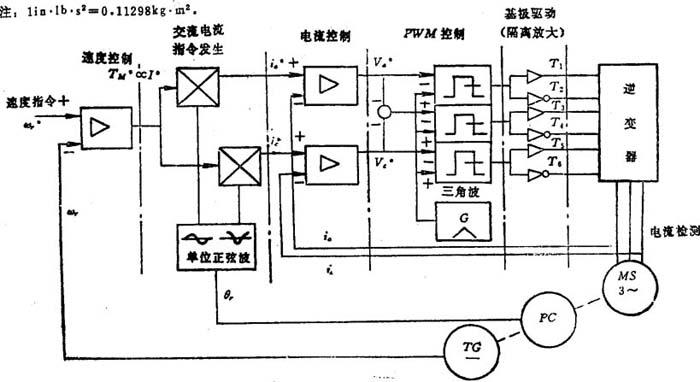
图8.5-135 电流控制变频调速系统原理框图
③矢量控制变频调速。通过轴系变换(变量变换)。从abc轴系转换到dqo轴系,得到电磁功率与对应的电磁转矩的dqo表达式:
T=P(ψd -ψaid)
-ψaid)
式中 P为电机极对数;ψd为dqo轴系d轴绕组总磁链;ψa为dqo轴系q轴绕组总磁链。若控制id=0,则
T=Pψdio (8.5-118)
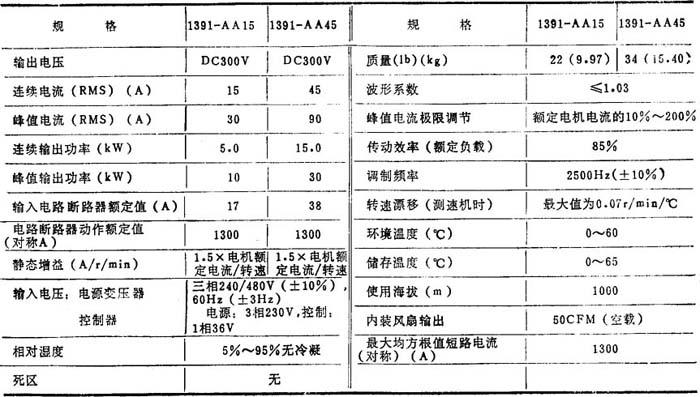
FANUC的SPWM交流速度控制单元的主要性能,SIEMENS的6SC61 SIMDDRIVE晶体管脉宽调制换流器以及A-B的1391系列交流伺服单元,分别见表8.5-36~8.5-38。
表8.5-36 FANUC SPWM速度控制单元
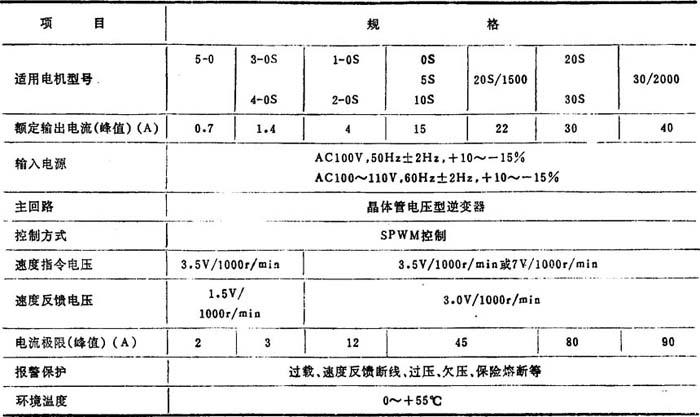
注:SPWM-正弦脉宽调制。
表8.5-37 SIEMENS 6SC61换向器

表8.5-38 A-B1391系列交流伺服单元