机器人操作手的主要参数
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第2070页(1097字)
机器人操作手的技术参数主要有以下几方面:
① 自由度数和坐标型式。自由度数是指操作手的手部(夹持器)相对机身(固定坐标系)所具有的独立运动个数。最多可具有6个,其中,臂部3个自由度定被抓工件的位置,腕部3个自由度定工件的姿态(方向)。一般操作手有3~5个自由度即能满足工作要求。对于某些专用机械手,有时只需要2~3个自由度。操作手的运动,其每一个自由度均需由一个动力源控制。因此,操作手的自由度数等于动力源的个数,也即等于关节(即运动副)的个数。
机器人操作手按其臂部的关节类型及组合情况,其运动坐标型式如图5.13-2所示。图a为直角坐标型,具有三个移动关节;图b为圆柱坐标型,具有二个移动关节一个转动关节;图c为球坐标型,具有一个移动关节二个转动关节;图d为多关节型,具有全部三个转动关节。
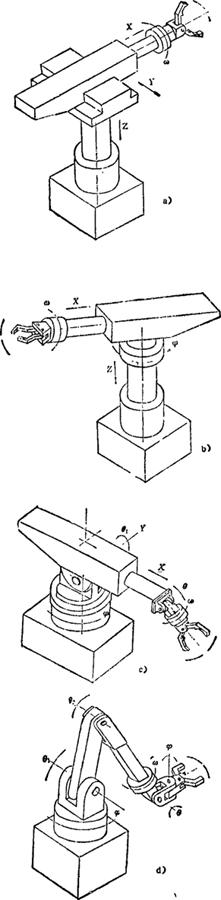
图5.13-2 机器人操作手的坐标型式
② 抓取重量。这是表明操作手负荷能力的参数。抓重的大小除与操作手本身的强度、刚度有关外,还与操作手的运行速度有关。一般是指在设计运行速度时所能抓取的工件重量。低速运行时所允许抓取的重量较高速运行时为大。根据用途不同,通常操作手的抓重在几十克到几十公斤范围内。
③ 运动速度。这是指操作手各个可动部分都运动时,夹持器中心处的最大速度。它与操作手的结构、抓重、控制方式等都有密切关系。操作手各可动部分的运行,一般包含起动加速、等速运行和减速制动等过程。为缩短运行周期,提高生产率。通常要求减少起动加速和减速制动的时间,提高等速运行的速度。然而,这将增大加速度的绝对值。使操作手受到较大的动载荷,从而影响操作手的工作平稳性和定位精度。目前,机器人操作手的最大线速度多数均在2m/s以内,个别的有达到6~9m/s。
④ 定位精度。通常是指操作手的重复位置精度。定位精度的高低,主要取决于操作手各运动部件本身的精度和刚度以及各运动关节中的间隙和位置的控制方式等因素。在一般情况下,自动化装置中的专用机械手多数采用机械挡块定位,以达到较高的定位精度(±0.02mm)。机器人操作手的伺服系统是一种位置跟踪系统,采用高精度的位置传感器检测,进行有反馈的闭环控制。因此可获得较高的定位精度。目前最高精度可达±0.01~0.05mm。