连杆曲线的多重生成与同源机构
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第2107页(1430字)
连杆曲线三重发生的罗伯特-契贝雪夫定理:每一条由四杆机构所生成的连杆曲线,都可由另外两个四杆机构生成。这说明,同一连杆曲线可由不同连杆机构连杆平面上的有关点画出,这些机构之间存在着一定尺寸转换关系。这样的能描绘同一连杆曲线的机构族,称为同源机构。同源机构的存在,使得有可能根据较好的运动特性、传动角和位置要求,来选择合适的机构。例如,有一曲柄摇杆机构A0ABB0,其连杆平面ABC上C点的轨迹曲线用来达到某个确定的目标,如图5.15-11所示。这一连杆曲线Kc还可由另外两个四杆机构生成。确定另外两个生成同一连杆曲线的四杆机构的尺寸,可借助于辅助图(见图b)。先在任一直线上画出杆长A0A、AB和BB0,并在线段AB上根据AC和BC作出连杆三角形ABC。然后过A0、B0和C点分别作连杆三角形三个边的平行线,这样就得到另外两个四杆机构A0EDM0和B0FGM0的尺寸。这些尺寸可转画到位置图(见图Ω),但预先要定出机架上的支承点M0。为此可先作三角形A0B0M0,同向相似于连杆三角形ABC。然后作平行四边形A0ACE和B0BCF及相似三角形CED和CFG,分别确定E、G、C和F点。于是得到能描绘同一连杆曲线Kc的三个四杆机构A0ABB0、A0EDM0和B0FGM0。
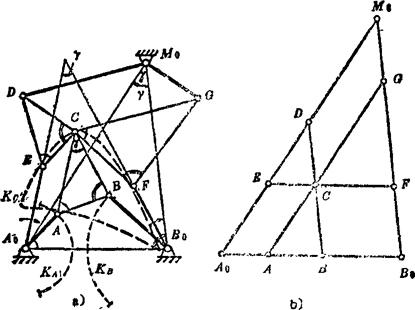
图5.15-11 同源机构尺寸的确定
a)位置图 b)辅助图
由图5.15-11可知,在同源机构中,连架杆A0E总是与连杆三角形的边AC保持平行,而连架杆B0F总是与连杆三角形的边BC保持平行。由于连杆三角形的两条边AC和BC的夹角γ是不变的,因而连架杆A0E和B0F间的夹角在机构运动的各个位置都保持相等角度γ。这样,在A0E和B0F之间可用传动比为1的匀速传动机构连接起来,如用平行四边形机构连接。同样,在连架杆A0A和M0G之间以及连架杆M.D和B0B之间也都具有相等的角速度。
如图5.15-12,若在连架杆A0A上选一点H。使A0H M.G,再在H点用铰链连接杆HI,作CGHI为一平行四边形,于是I点的运动轨迹将与连杆点C描出的连杆曲线Kc全同。应用这一性质,可得到图b)所示的六杆机构,它是在四杆机构A0ABB0的连杆点C上添加Ⅱ级组CIH构成的。由于选定H点时满足前述条件,因而铰链点Ⅰ描出一条全同于连杆曲线
M.G,再在H点用铰链连接杆HI,作CGHI为一平行四边形,于是I点的运动轨迹将与连杆点C描出的连杆曲线Kc全同。应用这一性质,可得到图b)所示的六杆机构,它是在四杆机构A0ABB0的连杆点C上添加Ⅱ级组CIH构成的。由于选定H点时满足前述条件,因而铰链点Ⅰ描出一条全同于连杆曲线 的曲线Kj0这就是说,构件CI是沿连杆曲线Kc作平行移动。
的曲线Kj0这就是说,构件CI是沿连杆曲线Kc作平行移动。
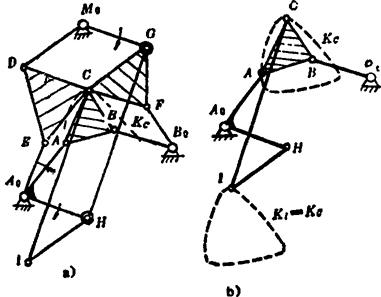
图5.15-12 利用同源机构性质构成的六杆机构
如果连杆三角形退化为直线,也就是A、B、C三点位于一条直线上,如图5.15-13。这时,已不是三角形相似,而是连杆上对应线段成比例。即
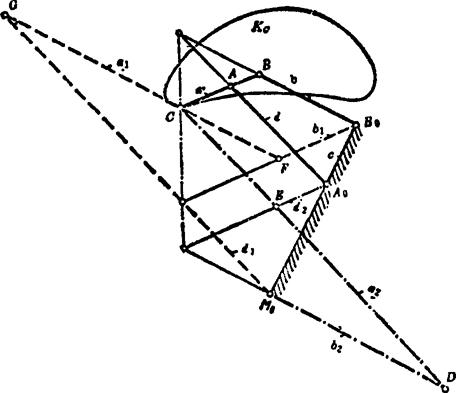
图5.15-13 同源机构尺寸的确定(连杆三角形退化为直线)CF∶CG=BA∶AC;CE∶ED=RA∶AC;B0A0∶A0M0=BA∶AC。若需求出其同源机构,可在B0A0的延长线上按上述比例定出M0,然后作平行四边形B0BCF和A0ACE定出F和E点,最后定出D和G点。于是,便得到能生成同一条连杆曲线的另外两个连杆机构。