概述
书籍:现代综合机械设计手册中
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1991页(902字)
用一系列齿轮组成的传动,称为齿轮系,简称轮系。在一个轮系中,可以同时包含圆柱齿轮、圆锥齿轮和蜗轮蜗杆等各种类型的齿轮。
轮系运转时,若其中至少有一个齿轮的轴线绕位置固定的另一轴线回转,这类轮系称为周转轮系,如图5.7-1和图5.7-2所示。图示轮系中,齿轮c除绕几何轴线O2转动,同时又随几何轴线O2绕固定的几何轴线O1回转。由于齿轮c兼有自转和公转,故称其为行星轮。绕固定轴线O1回转的齿轮a,称中心轮或太阳轮。装有行星轮的构件H,称为系杆或行星架.图5.7-1所示周轮系转只有一个自由度,称为行星轮系。图5.7-2所示周转轮系,有两个自由度,称为差动轮系。行星轮系和差动轮系统称行星齿轮传动。
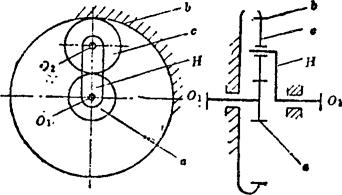
图5.7-1 行星轮系
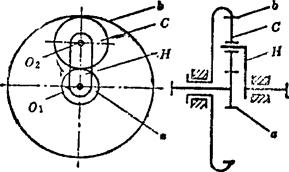
图5.7-2 差动轮系
在周转轮系中,中心轮和系杆的轴线相互重合且对机架的位置固定不变,这一共同轴线称为周转轮系的主轴线。凡轴线与主轴线重合,而且承受外力矩的构件,称为基本构件。
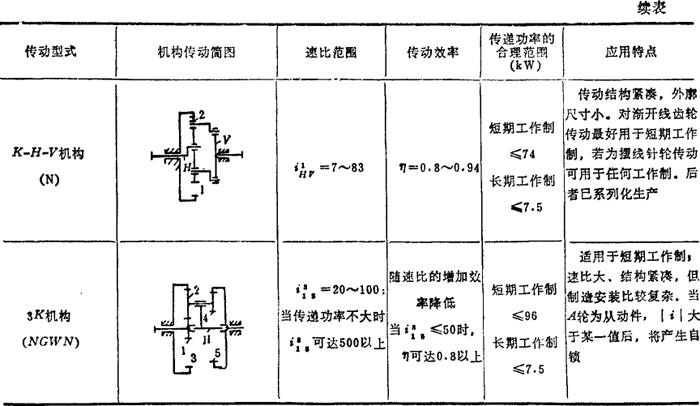
周转轮系的种类很多,按其基本构件可分为2K-H、3K和K-H-V三大类(代号K表示中心轮,H表示系杆,V表示带等角速比输出机构的输出轴);若按轮系中齿轮的啮合方式分,又可分为NGW型、NW型、NN型、WW型、N型和ZUWGW型等(N代表内啮合,W为外啮合,G代表公用的行星轮,ZU代表锥齿轮),常用的行星齿轮传动的类型及特性见表5.7-1。
表5.7-1 常用的行星齿轮机构特性
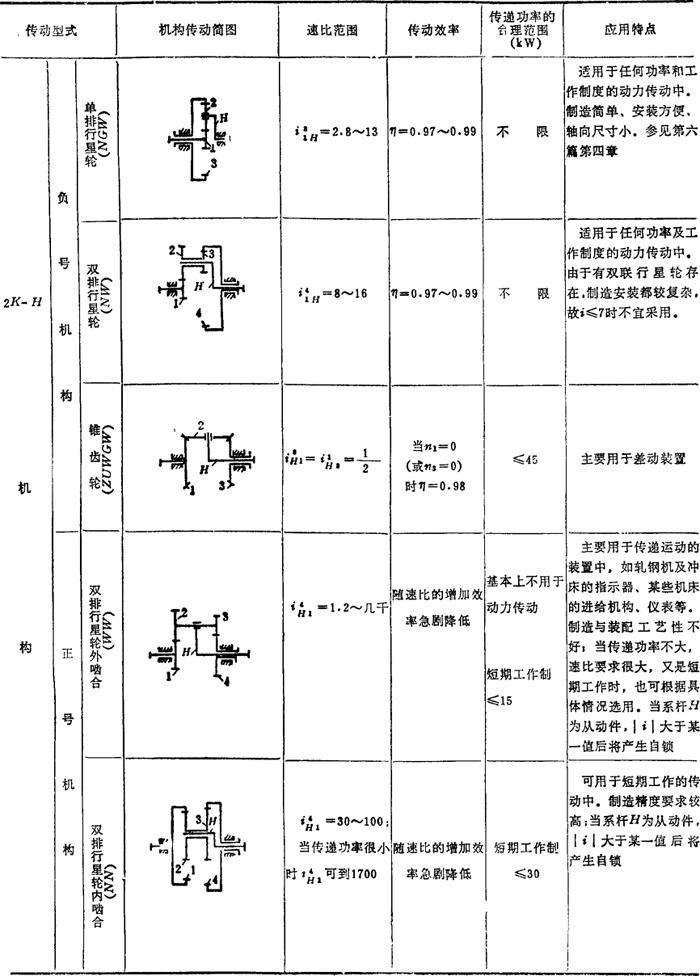
注:① 正、负号机构的含意见节2。
② 传动效率是总的效率;啮合效率的计算见节3。