渐开线少齿差行星齿轮传动(1)
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1999页(1785字)
如图5.7-10所示,渐开线少齿差行星齿轮传动由内齿轮b、行星轮c、系杆H和带等角速比机构的输出轴V组成。行星轮比内齿轮只差很少几个齿(常用齿数差为1~4)。这种传动只用于减速。传动时,系杆主动,行星轮从动。其传动比计算如下:
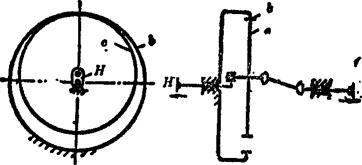
图5.7-10 渐开线少齿差行星齿轮传动

由上式可知,要增大传动比,就需使齿数差(zb-zc)尽可能少。由于齿轮齿数只能是整数,所以最少齿数差为1,这时机构的传动比达到最大值,等于行星轮的齿数zc。式中有“-”号表示输出轴和输入轴转向相反。
等角速比输出机构可采用孔销输出机构、双万向联轴节和十字滑块联轴节等。通常多数采用孔销输出机构。
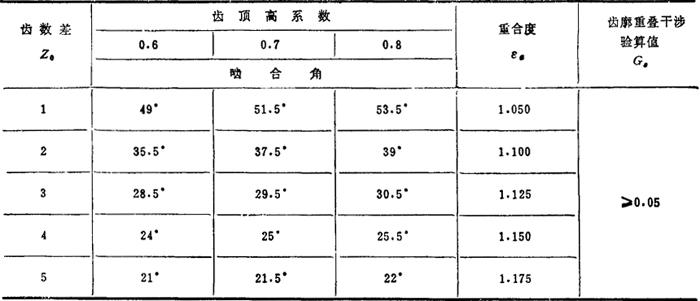
由于渐开线少齿差行星齿轮传动是齿数差很少的内啮合传动,采用标准齿轮不可能进行正常的啮合传动,会发生各种干涉,如齿廓重叠干涉、过渡曲线干涉、径向装入干涉以及切齿时的顶切和根切等。因此,需采用齿顶高系数较小、变位系数和啮合角较大的内啮合传动,以避免各种干涉现象的发生。在各种干涉现象中,最主要的是齿廓重叠干涉,设计时应进行校核。所以,少齿差变位传动的主要限制条件仅有:不发生齿廓重叠干涉;重合度大于1。如图5.7-11所示,其中M为两轮齿顶圆的交点,
齿廓的重叠干涉只能发生在M点以前。若要求不发生齿廓重叠干涉,则须使
∠aO2P≥∠MO2P
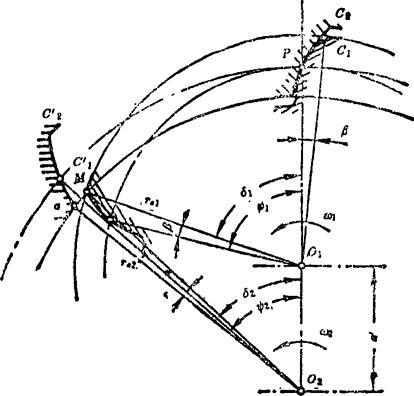
图5.7-11 齿廓不重叠干涉
由图可知 ∠aO2P=φ2+γ=φ2+inva'-invaa2

∠MO2P=δ2
经整理可得齿廓不发生重叠干涉的条件为:
Gs=z1(invaa1+δ1)-z2(inVaa2+δ2)+(z2-z1)inVa'≥0 (5.7-22)
式中 Gs为齿廓重叠干涉验算值;aa1、ac2分别为外、内齿轮的齿顶圆压力角;a'为内啮合传动的啮合角:ra1、rb2分别为外、内齿轮齿顶圆半径;
表5.7-5 啮合角选用值
渐开线少齿差齿轮副的几何计算,需预先确定内外齿轮的加工方法,以选择合适的公式,且要根据经验数据预选某些参数,再反复进行验算。齿顶高系数为 ,齿数差分别为1、2、3和4的齿轮几何尺寸和参数见表5.7-6~5.7-9。表中均以m=1mm计算,其中的da、Wk、a'均应乘以实际所采用的模数。编制这些表时,保证了如下所列的限制条件的预期值,s4、εa及Gs以外的其他项目没有进行验算。表中的齿顶圆按德国工业标准DIN的简单方法计算。即:
,齿数差分别为1、2、3和4的齿轮几何尺寸和参数见表5.7-6~5.7-9。表中均以m=1mm计算,其中的da、Wk、a'均应乘以实际所采用的模数。编制这些表时,保证了如下所列的限制条件的预期值,s4、εa及Gs以外的其他项目没有进行验算。表中的齿顶圆按德国工业标准DIN的简单方法计算。即:
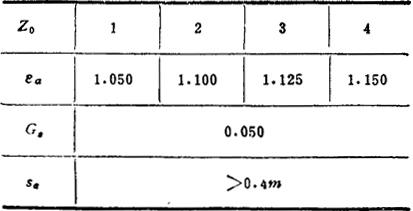

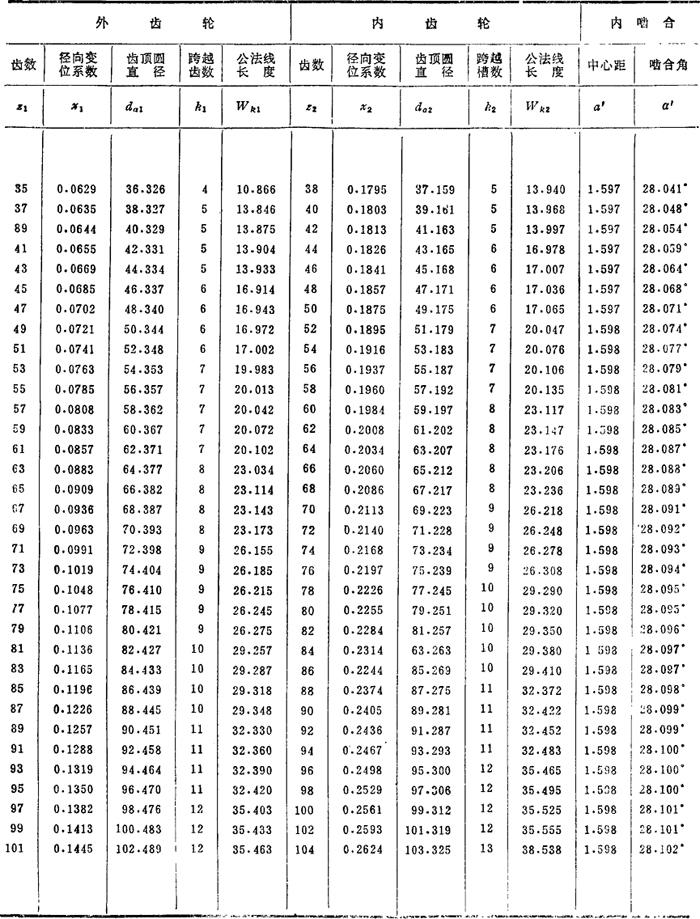
表5.7-6 一齿差几何尺寸及参数
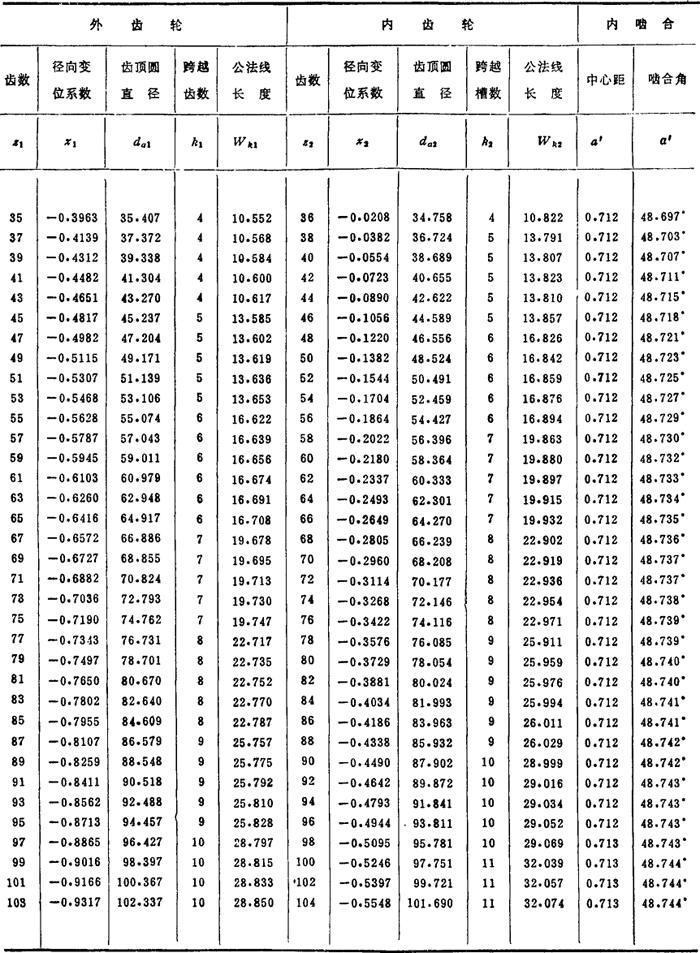
注:表中所有长度单位均为mm。
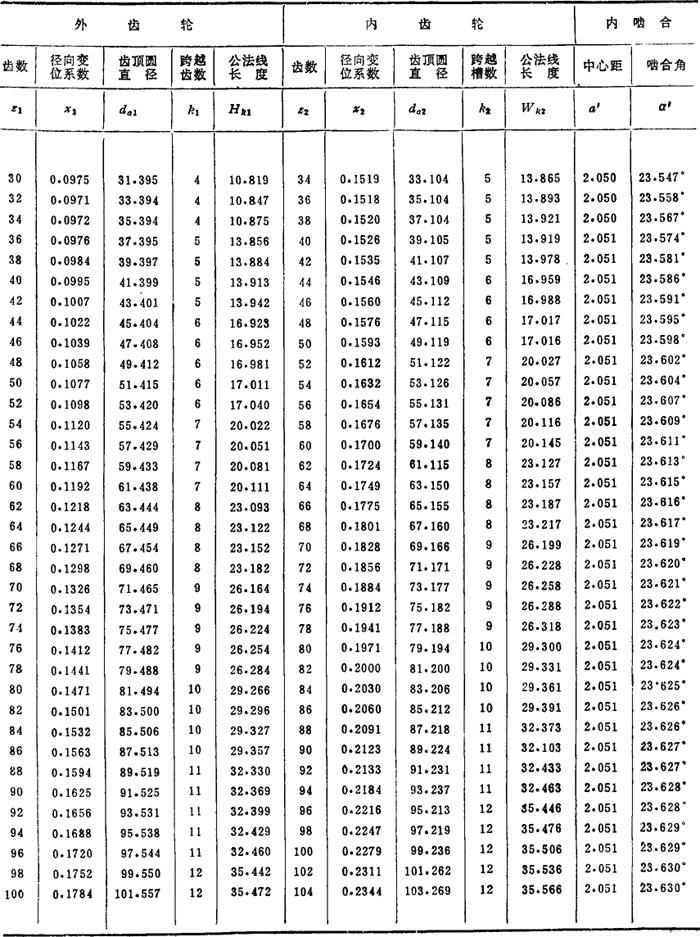
表5.7-7 二齿差几何尺寸及参数( ,a=20°,m=1mm)
,a=20°,m=1mm)
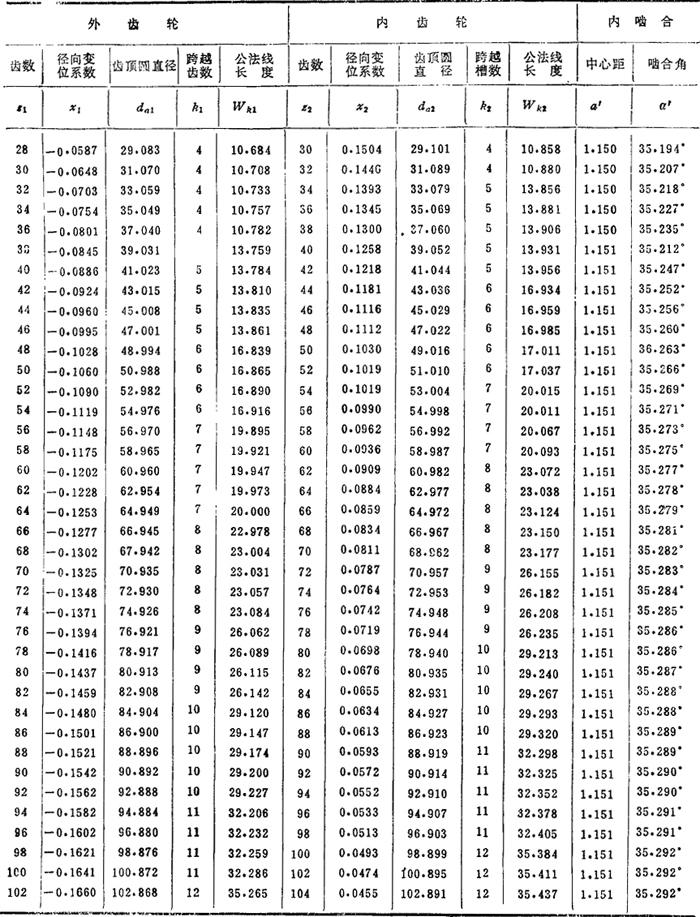
注:表中所有长度单位均为mm。
表5.7-8 三齿差几何尺寸及参数( ,a=20°。m=1mm)
,a=20°。m=1mm)
注:表中所有长度单位均为mm。
表5.7-9 四齿差几何尺寸及参数( ,a=20°,m=1mm)
,a=20°,m=1mm)
注:表中所有长度单位均为mm。