齿轮连杆机构
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第2007页(2070字)
齿轮连杆机构是齿轮机构和连杆机构的组合。由于连杆机构有多种形式,因此齿轮连杆机构的结构形式极为多样。但概括起来,可分为两类。一类的基础机构是自由度为2的差动轮系,通过自由度为1的四杆机构将其封闭起来,得到自由度为1的机构,如图5.8-4所示;另一类采用自由度为2的五杆机构作为基础机构,用自由度为1的齿轮机构将其封闭起来,如图5.8-5所示。
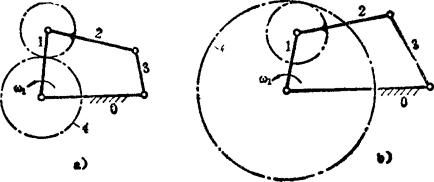
图5.8-4 用四杆机构封闭
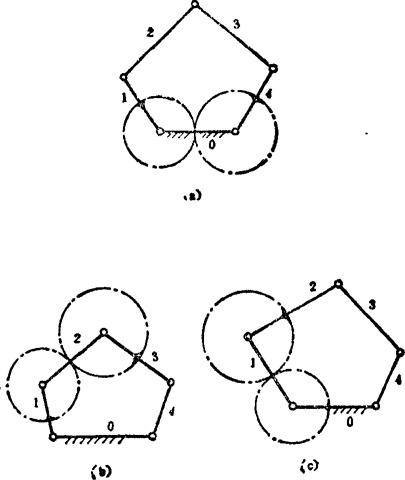
图5.8-5 用齿轮机构封闭
齿轮连杆机构从动件的运动,可以是匀速或非匀速运动,还可以具有瞬时停歇或部分逆转;齿轮连杆机构某些构件的点所描绘的轨迹曲线为高阶曲线,其形状比通常的连杆曲线丰富、多变。
图5.8-6所示齿轮连杆机构,由自由度为2的五杆机构和一对安装在机架的齿轮组合构成。两齿轮分别和连杆机构的杆1和杆4固结。机构运动时,连杆2和连杆3的铰接点描绘出复杂的运动轨迹。改变杆1和杆4的相对相位角、齿轮的传动比以及五杆机构各杆件的相对尺寸,可以得到不同的运动轨迹。如将一对相啮合的齿轮安置在铰链四杆机构的可动构件上,便构成图5.8-7所示的齿轮连杆机构。运动时,从动轮5上的M点将走出轨迹mm,其形状取决于连杆机构各构件的相对尺寸、齿轮传动比和M点在从动轮5上的位置。显然,M点的轨迹比单一的铰链四杆机构的连杆曲线更为复杂多样,因而容易实现预定的轨迹。
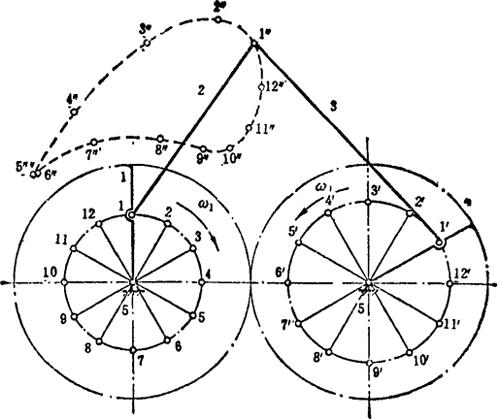
图5.8-6 齿轮连杆机构之一
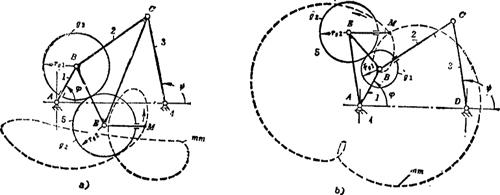
图5.8-7 齿轮连杆机构之二
图5.8-8所示齿轮连杆机构由差动轮系和连杆机构组合而成。曲柄2是差动轮系的系杆,行星轮和连杆3相固结,运动由曲柄输入,从空套在轴上的齿轮5输出。由差动轮系传动比公式可得

图5.8-8 齿轮连杆机构之三
式中比值ω3/ω2可由四杆机构用解析法求出,得

由上式可看出,改变连杆机构的参数或改变齿轮的齿数,都可使机构传动比i52得到改变,因而可使从动轮实现复杂的运动规律,能短时停歇、短时反向转动。
图5.8-9所示为三齿轮式齿轮连杆机构。齿轮1与曲柄a固结,齿轮6空套于轴D上。由周转轮系传动比公式可得

图5.8-9 三齿轮式齿轮连杆机构
将(5.8-4)式代入(5.8-5)式可得
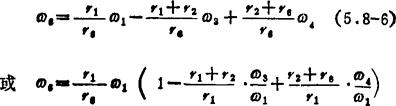
式中ω3/ω1和ω4/ω1可由四杆机构用解析法求出
因 b=r1+r2、c=r2+r6,令 ,得
,得
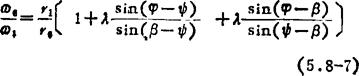
由式(5.8-7)可知:ω0/ω1的比值决定于r1、r6、φ、β、ψ和λ,并随φ的变化而变化,如图5.8-10所示,其变化规律近似正弦曲线型。λ对ω6/ω1比值的变化规律有明显影响当λ较小时(λ<0.75),输出轴作单向变速转动;λ增大后,输出轴会出现片刻停歇现象;λ再增大,输出轴将在一段区间内产生逆转运动。
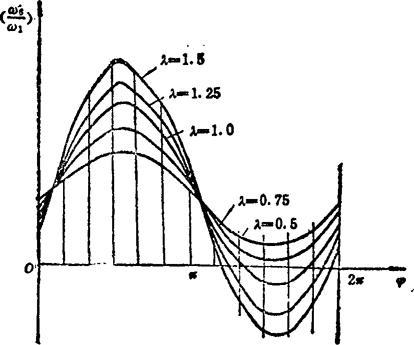
图5.8-10 ω6/ω1的变化规律
图5.8-11为另一种形式的行星齿轮连杆机构,由内啮合行星轮系和曲柄滑块机构组成。连杆3和行星轮2铰接于M点,齿数比z0/z2=3.机构运动时,行星轮2节圆上的M点将画出三支内摆线。适当选定连杆3的长度l,使以C为中心、l为半径的圆弧通过内摆线的M、M'、M"点,则当主动杆1由位置AL转过2φ角至位置AB'时,从动滑块4将处于近似停歇状态(从动滑块的行程s=4r2)。若把滑块4换成摇杆,则摇杆摇动时具有单侧停歇。
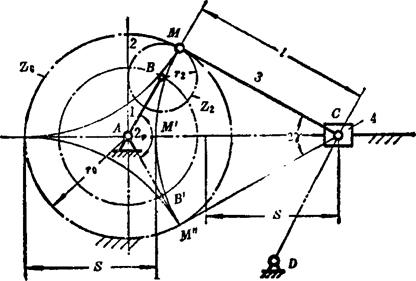
图5.8-11 行星齿轮连杆机构
以上行星轮式齿轮连杆机构运转时具有单侧停歇,是利用行星轮M点走出的内摆线近似于圆弧。若取 ,z0/z2=4,则M点走出具有近似圆角的正方形。把杆3铰接于M点,构成的齿轮连机杆构则具有双侧停歇,如图5.8-12所示(从动滑块的行程
,z0/z2=4,则M点走出具有近似圆角的正方形。把杆3铰接于M点,构成的齿轮连机杆构则具有双侧停歇,如图5.8-12所示(从动滑块的行程 )。
)。
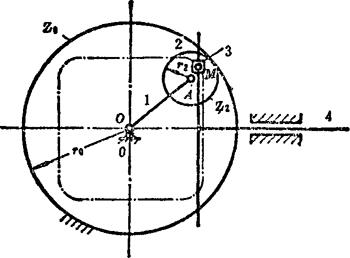
图5.8-12 具有双侧停歇的齿轮连杆机构