腕部机构
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第2075页(2096字)
机器人操作手的腕部,是连接手部和臂部的关节部分,其作用是支承手部、并在臂部运动的基础上,进一步改变和调整手部在空间的方位和位置,以扩大操作手的动作范围。
腕部的基本运动是转动,也有少数设计成可以作短距离的移动。腕部最多可具有4个自由度。如图5.13-17所示,除有3个绕坐标轴X、Y、Z转动自由度外,还有一个平移自由度。通常称绕X轴的转动为旋转,绕Y轴的转动为俯仰,绕Z轴的转动为偏摆,沿Y轴的移动为横移。

图5.13-17 操作手腕部运动示意图
机器人操作手的腕部,可根据其工作任务和性质而定。对于动作简单的机械手,为简化结构,也可不设腕部,直接由臂部驱动手部。对于要求完成复杂动作的操作手,如弧焊、喷漆等,则必须设置具有多个自由度的腕部。
机器人操作手腕部关节动作的驱动方式,一般是用液压或气动直接驱动,或由电机通过减速装置(如齿轮、链轮、同步齿带传动等)驱动。几种基本的典型结构如下:
① 具有一个旋转关节的腕部。如图5.13一18所示,当高压气由主视图右下侧的管道11通入,经过进气口7(A-A剖面图中)进入摆动气缸1时,将推动动片4带着转轴3转动,使与其相固结的手部10旋转。动片转到与定片2接触时被限位。反之,当高压气从另一进气口6进入时,动片将带动手部作反方向转动,到与定片另一侧接触时被限位。手部的旋转角度,由动片与定片的接触位置情况予以确定。
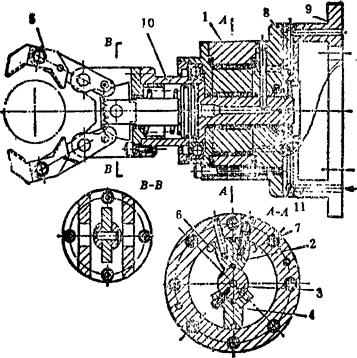
图5.13-18 具有旋转关节的腕部
图5.13-19所示为单腕双手的腕部。手腕的转动由活塞齿条1带动齿轮轴2回转实现(见A-A剖面),其特点是,手指的夹紧缸和手腕的回转缸可实现独立控制。由于油路①、②、③、④均布置在结构内部,因而结构紧凑,外形整齐美观。
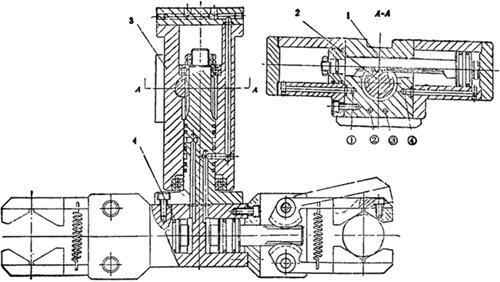
图5.13-19 具有旋转关节的腕部
② 具有两个回转关节的腕部。
图5.13-20为具有旋转和偏摆关节的腕部。在A-A剖面所示回转油缸中,缸的外壳转动而中心轴不动,实现腕部摆动。在B-B剖面所示油缸中,缸的外壳不动而中心轴回转,实现腕部的旋转。图5.13-21所示为具有旋转和俯仰关节的腕部,其旋转由摆动油缸驱动,其中缸的外壳3相对不动,动片4与夹紧油缸的外壳5固结,并一起旋转。腕部的俯仰转动,由安装在手臂后部的摆动油缸通过齿轮和链轮传动实现的(也可用同步齿形带传动),如图b)所示。这种腕部的特点是传动简单,结构紧凑、轻巧。
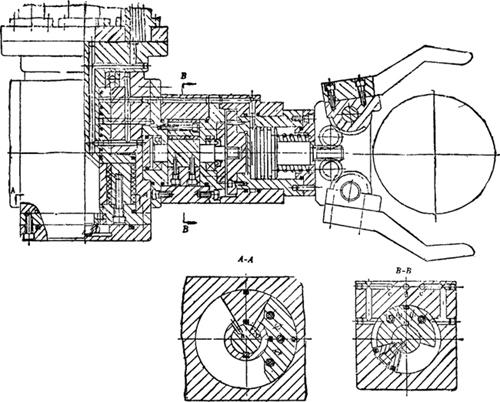
图5.13-20 具有旋转和偏摆关节的腕部
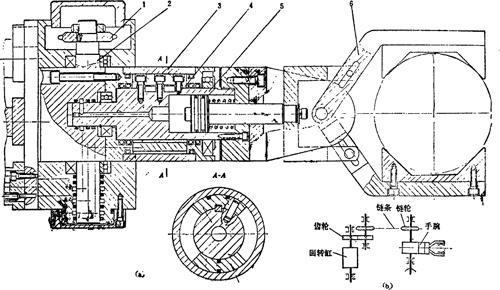
图5.13-21 具有旋转和俯仰关节的腕部
图5.13-22所示是另一种具有旋转和俯仰关节腕部的机构简图。其旋转运动由S轴驱动,通过锥齿1、2和3、4的啮合传动。因手部与锥齿轮4连为一体,从而可实现手部绕X轴的旋转。俯仰运动由B轴驱动,通过锥齿轮5、6,带动锥齿轮6绕A轴作回转。因手部的壳体7与轴A连为一体,从而实现手部绕y轴的俯仰。但由图可见,当锥轮6作俯仰运动时,将与锥轮3、4组成行星轮系(此时S轴不转,锥轮3为固定轮),锥轮6的转动将迫使锥轮4绕x轴产生一附加的自转,即手部的附加旋转。这种附加运动通常被称为“诱导运动”,在设计分析手腕旋转时应注意予以补偿。一般采用控制S轴反向同步回转进行修正。

图5.13-22 具有旋转和俯仰关节的腕部
③ 具有三个回转关节的腕部。图5.13-23所示是具有旋转、俯仰、偏摆关节腕部的机构简图。由电机Ⅰ驱动,通过锥轮1,2,3、4以及同步带轮13、14、15和锥轮5、6传动,使锥轮6转动,手部19与锥轮6固结,以实现手部旋转。由电机Ⅱ驱动,通过锥轮7、8,9、10以及同步带轮16、17、18,使带轮18转动,以实现腕部的俯仰运动。由电机Ⅱ驱动,通过直齿轮11、12直接带动腕部完成偏摆运动。如前所述,在此机构中,无论是作俯仰或是偏摆运动,都将使手部产生附加的旋转运动,即“诱导运动”,设计分析时应予以补偿。
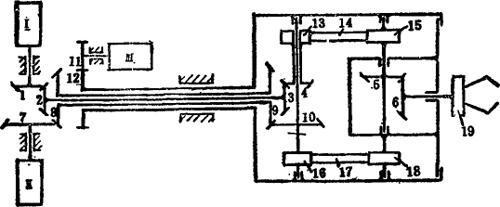
图5.13-23 具有旋转、俯仰和偏摆关节的腕部
上述的后两种采用轮系传动的腕部结构,均具有结构紧凑、重量轻、传动扭矩大等特点,可采用电机驱动,实行电控。