吸附类手部
书籍:现代综合机械设计手册中
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第2074页(647字)
吸附类手部有气吸式、磁吸式两类。气吸式手部如图5.13-15所示,其结构简单,重量轻,使用方便可靠,且不会损伤工件表面。图a)为真空式吸附装置。图b)是负压式吸附装置,压缩空气进入进气口后管路开始一段是逐渐收缩的,所以气流速度逐渐增大。到达最小截面s处,气流速度达到临界速度(即音速)。此时气体受压密度加大。此后,在排气管路中,管路是渐扩形的,因截面积逐渐增大,气体膨胀减压而密度下降,致使气流速度继续增高,在吸气口处形成负压,并通过吸盘吸住工件。吸盘的大小和数量,与工件的大小及表面形状有关。
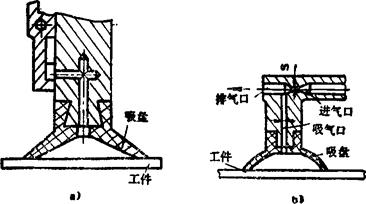
图5.13-15 气吸式手部
磁吸式手部如图5.13-16所示,主要由铁芯、线圈及衔铁等组成。其工作原理如图a)所示。当线圈1通电后,磁力线通过铁芯2、空气隙和衔铁3形成闭合回路。衔铁受到电磁吸力F的作用,在吸向铁芯的同时,产生与磁场极性相反的极性,吸住工件。电源切断,磁场消失,工件即被释放。图b)是一种盘式电磁吸盘的结构图。
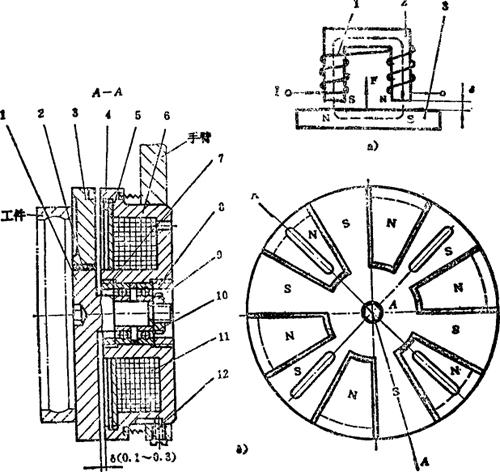
图5.13-16 磁吸式手部
磁吸式手部的特点是:所产生的单位面积吸力较大,对工件表面的粗糙度及通孔、沟槽等无特殊要求;但只能吸住铁磁性物质(如钢铁件)的工件,且会使工件留有剩磁,另外吸盘上也常会吸附有铁屑,而妨碍工作。
上一篇:腕部机构
下一篇:现代综合机械设计手册中目录