操作手的运动方程
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第2083页(2479字)
用齐次变换矩阵来表示操作手每一杆的位置和方位,其目的是最终求得末端夹持器的位置和方位。图5.13-31所示是PUMA机器人的结构。机器人各杆之间一般用转动关节或移动关节连接。从基座开始对杆编号:基座编为零号,建立固定的基座坐标系;基座与1号杆连接组成的关节编为1号关节。以此类推,末端夹持器的编号为N,它与前面的杆以编号为N的关节连接。第i杆一前一后共有二个关节,其编号为i和i+1。每个关节都有驱动器。驱动器使关节作相对转动或移动,形成末端夹持器的位置和方位的变化。在每个杆上建立一个连杆动坐标系。通常连杆坐标系的原点选在关节的轴线上,而z轴就是该关节的转动轴或移动轴。在i+1关节上建立i杆的连杆坐标系xj,yj和zj,它们相互正交并表示坐标轴的单位矢量。坐标系与i杆固结一起运动。如图5.5-32所示,zj就是i+1关节轴上的单位矢量。以后简称i+1关节上的连杆坐标系为i杆系。
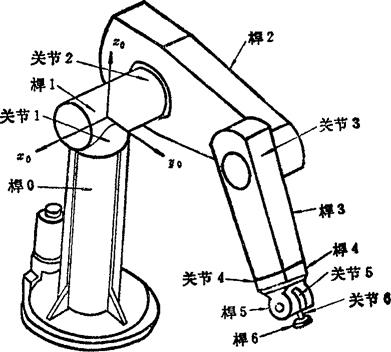
图5.13-31 PUMA机器人的杆和关节
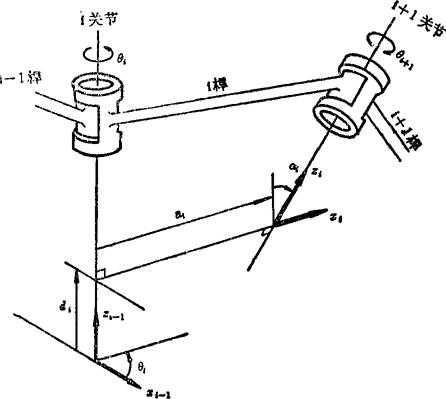
图5.13-32 杆系和杆的几何参数
Denavit和Hartenberg 1955年提出建立杆系的规则(称为D-H表示法):1.zj在i+1关节的轴上;2.在i关节轴和i+1关节轴之间作一根公垂线,xj在公垂线上并且指向公垂线的外延方向,3.yj垂直xj和zj,其方向由右手定则确定。
PUMA机器人有6个杆,因此有6个杆系。基座坐标系编号为零,简称为定系。z。在第一关节轴上,而x0和y0的方向是随意的。第六个杆系在末端夹持器上,x5必须垂直z5。
按照D-H表示法,一个杆共有4个几何参数θj、dj、al和αj。θj是从xj-1至xj轴之间的夹角;d1是i-1杆系原点至xj轴与zj-1轴交点之间的距离;aj是zj-1和zj轴之间的最短距离;αj是从zj-1轴至zj轴的歪扭角。对于转动关节,dj、aj和aj是杆的几何参数,而且是不变量,θj是关节变量。对于移动关节,θj、aj和aj是杆的几何参数,而且是不变量,d是关节变量。
相对于i-1杆系,按D-H规则,建立第i杆系的齐次变换矩阵,用来表示i杆系相对i-1杆系的位置和方位。其建立过程是:1.绕i-1杆系的zj-1轴转θj角,使xj-1和xj平行;2.沿z1-1轴方向移动dj,使xj-1和xj重合;3.沿xj轴方向移动aj,使原点重合;4.绕i杆系的xj轴转aj角,得到i杆系的位置和方位。
上述移动和转动是相对于连杆坐标系(即杆系)进行的,应依次右乘。于是得相邻二杆系的D-H变换矩阵为:

利用(5.13-6)式,上述矩阵的逆为

如果i杆上有一点Pj,它在i杆系上的齐次坐标为pj=〔xlytzl1〕T,在i-1杆系上的齐次坐标为pj-1=〔xl-1yl-1zl-11〕T,则
 (5.13-18)
(5.13-18)
图5.13-33和5.13-34分别是PUMA和Stanford机器人的杆系和几何参数。
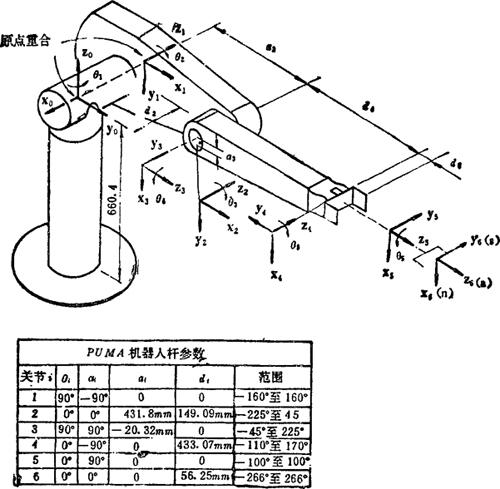
图5.13-33 PUMA机器人的杆系和几何参数
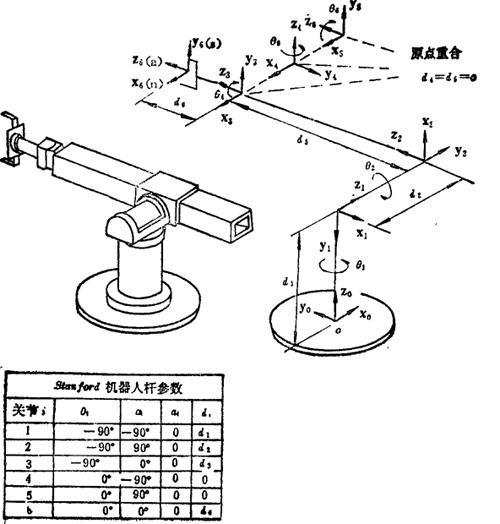
图5.13-34 Stanford机器人的杆系和几何参数
第i杆系在基座坐标系中的位置0pj和方位0Dj以齐次变换矩阵0Aj表示。它是从基座到i杆系齐次变换矩阵j-1Al的链乘积,即
对于PUMA机器人其相邻杆系的齐次变换矩阵为(参看5.13-16式):


其中,Cj=cosθl;Sj=sinθj。
操作手运动学的正问题是要求末端装置上的连杆坐标系(第6杆系)在基座坐标系中的位置和方位,即求
T=0A0=0A11A22A33A44A55A6(5.13-20)
式中T称为臂矩阵。末端装置上的连杆坐标系(第6杆系)的坐标原点在夹持中心,其指向由三个单位矢量n、s和a确定,如图5.13-35所示。可以看出
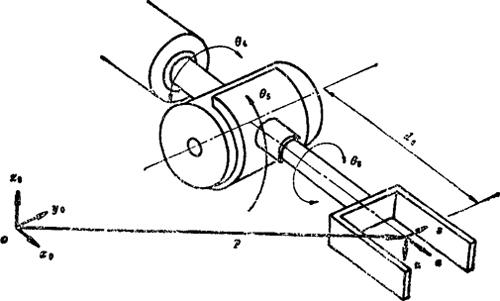
图5.13-35 末端装置上的连杆坐标系
其中,n=夹持器的法向矢量,它垂直手指;8=夹持器的滑动矢量,它在手指开合方向:a=夹持器的接近矢量:p=夹持中心的位置矢量。规定n= 。
。
为了减少数值计算的工作量,一般把前三个矩阵相乘,得T1=0A11A22A3(T1决定夹持器的位置):把后三个矩阵相乘,得T2=3A44A55A6(T2决定夹持器的方位),最后再由计算机完成T=T1T2的数值计算。对于PUMA机器人:
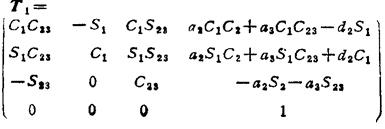
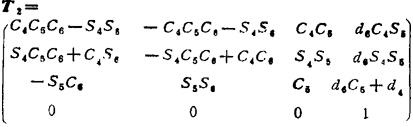
这里Ctj=cos(θj+θj);Sjj=sin(θj+θj)。数值运算中计算机基本没有作与零相乘的空运算,因此节省了机时。