力控制系统
出处:按学科分类—工业技术 北京理工大学出版社《新编液压工程手册下册》第2071页(2636字)
现要求设计一个如图34.3-27的力控制系统。其设计参数及性能指标为
拉伸和压缩状态下的最大负载力 Fm=90000N
输入指令信号下控制精度 ±5%
液压缸最大行程 S=10cm
负载弹簧刚度 k=9000~180000N/cm
负载质量 M=450kg
供油压力 ps=17.5MPa
系统时间常数 τ1=10s
(1)液压缸的确定
根据力控制系统的控制特性,系统要在供油压力的95%状态下工作取负载压力pL=0.95,ps=16.625MPa,则液压缸有效工作面积A=Fm/pJ=54.2cm2,令d/D=0.5,则D=9.59cm,取D=10cm,d=5.5cm,校核得A=54.78cm2。
(2)选择电液伺服阀
为满足输出负载力动态性能的要求,从低负载弹簧状态求出活塞运动最大速度。当无超调的时间常数控制在10秒以内时的特性曲线如图34.4-9上的抛物线。
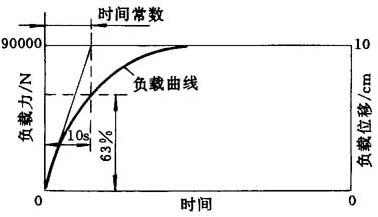
图34.4-9 理想的过渡曲线
对于弹簧刚度为9000N/cm的弹簧力,最大负载力9000N是由10cm的活塞行程产生。则最大行程速度vm是以时间常数为10秒计算的

最大流量 qm=vmA=54.78 cm3/s
处于最大负载的63%时,负载所需要的压力
pL=16.625MPa×63%=3.286 MPa
此外,在活塞小位移时,用极小的压力差即可推动负载,为充分利用伺服阀的流量,现选定压力降为7MPa,输出流量为3.8L/min的伺服阀。设阀的流量增益Ka,压力一流量增益Kc分别为
Ka=0.45 (m3/s)/m
Kc=0.98×10-12 (m3/s)/(N/m2)

阀的额定电流IR=150mA,输出位移xv=0.038cm,增益为

(3)力反馈传感器
输入力为Ff=113000N,输出电压为Vf=0.01V,其增益为

(4)静态特性
为得到±5%静态控制精度,开环增益

取 K0=25,电放大器增益

(5)动态特性
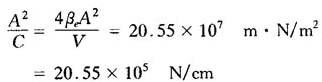
为了确定ω1、ω3,要计算油的压缩性,设油路的阻尼系数 ,其中V是液压缸的总油腔容积,为确保行程充裕,选择工作行程大于10cm行程的液压缸,取行程为x=15cm的液压缸,计算液压缸容腔V=A.x=8.22×10-4m3,假设βe=14×108Pa,则此时油路阻尼系数C=0.146×10-12m3/(N/m2)。根据油的压缩性,计算弹性系数
,其中V是液压缸的总油腔容积,为确保行程充裕,选择工作行程大于10cm行程的液压缸,取行程为x=15cm的液压缸,计算液压缸容腔V=A.x=8.22×10-4m3,假设βe=14×108Pa,则此时油路阻尼系数C=0.146×10-12m3/(N/m2)。根据油的压缩性,计算弹性系数
把这个值与k比较,可知控制系统在 的情况下工作,负载弹簧k=180000N/cm时
的情况下工作,负载弹簧k=180000N/cm时

负载弹簧k=9000N/cm时
取开环增益为25,根据开环放大特性求出穿越频率:
负载弹簧k=180000N/cm时
ωc=25×0.477≈12 rad/s
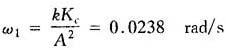
负载弹簧k=9000N/cm时
ωc=25×0.0238≈0.6 rad/s
输入为阶跃函数的系统响应时间(即达到输出最终值的63%的时间)大约等于1/ωc,即k=180000N/cm时,Tc=1/ωc≈0.083s,而当k=9000N/cm时,Tc=1/ωc≈1.67s。
和前面规定的指标相比,此响应时间非常短,能够满足要求。
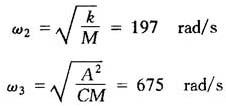
频率ω2、ω3与负载质量有关,由负载弹簧刚度的最大值决定。
k=180000N/cm时,弹簧的计算频率为
对应于ω3的阻尼比
ω3的共振峰值超过了图34.4-10所示的零分贝轴,这是造成系统不稳定的原因。为此在ω2前的一个频率处加入一个校正网络 ,使得系统的超调量减少。
,使得系统的超调量减少。
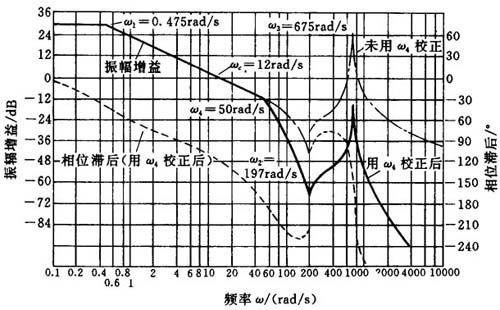
图34.4-10 k=180000N/cm弹簧的开环波德图