计算机控制的液压控制系统
出处:按学科分类—工业技术 北京理工大学出版社《新编液压工程手册上册》第199页(2746字)
图6.2-7表示一个典型的计算机控制的位置液压控制系统的结构。
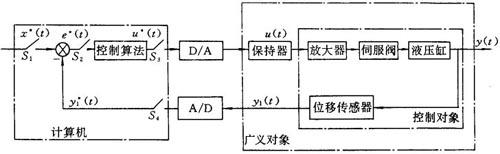
图6.2-7 计算机控制的位置液压控制系统
液压系统采用控制阀控制液压缸,并用直线位移传感器进行位置反馈。采样作用是用虚拟开关S1, S2,S3,S4表示,计算机对输入信号和反馈信号经过采样周期T采样一次,经过比较后得出误差信号,再按控制算法进行运算,将得到的控制信号送到液压系统。这里,控制算法的作用相当于模拟式控制系统中的校正环节。因为计算机按采样周期进行控制,所以系统属于采样控制系统。系统的分析理论参阅第5章中有关部分。下面将介绍计算机控制系统中数字控制器的结构、信号传递的过程及采样系统的数学模型。
(1)数字控制器
数字控制器的硬件结构及信息的变换和传递过程如图6.2-8所示。
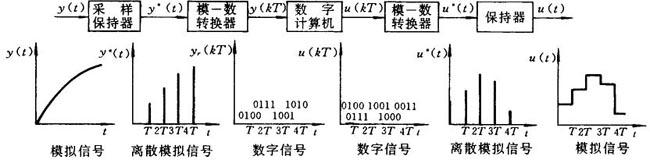
图6.2-8 数字控制器结构及信息的变换和传递
A.采样保持器
采样保持器用来对模拟信号v(t)采样,并保持一段时间,采样得到的是时间上是离散、幅值上是连续的离散模拟信号,采样周期是每隔时间间隔T之后,采样开关闭合一次。采样过程的数学表达式如下:

式中δ-脉冲函数
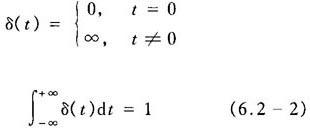
根据采样定理,要使采样信号能够恢复原来的连续信号,应使采样角频率ωs≥2ωmax,ωmax是连续信号y(t)频谱特性中的最高角频率

B.模—数转换器
由于离散模拟信号y*(t)仍是一个模拟量,而计算机内运行的是二进制数字信号,通过模—数转换器把离散的模拟信号转换成时间上、幅值上均为离散的数字量,这个过程称为量化。量化的精度取决于模—数转换器的位数n,当位数n足够多时,转换可达到足够的精度。转换器末位(最低位)代表的数值称为量化单位q

 ,
, 分别代表转换器输入的最大值和最小值。
分别代表转换器输入的最大值和最小值。
量化引起的误差是量化误差ε

常用模—数转换器的位数n=8或更多,量化误差与全量程( -
- )之比很小,计算中可忽略不计。
)之比很小,计算中可忽略不计。
C.数字计算机
数字计算机与外围设备一起构成数字控制器,同时具有显示、打印、报警、制表等功能。控制计算机除主机外,还有存储器、显示器、打印机、报警单元和操作控制台及比较完善的输入、输出通道,如模拟量的输入、输出通道;数字量的输入、输出通道;开关量的输入、输出道通和相应的指令,以及完善的软件系统以便控制输入、输出指令、完成信号的判断和计算,并给出二进制数字输出信号U(kT)。
D.数—模转换器和零阶保持器
从计算机输出的控制信号是二进制数字脉冲信号,需要经过D/A转换器和保持器的变换,才能输入到模拟式控制、执行机构。D/A转换器的作用是将二进制数字信号U(KT)转换成离散模拟信号u*(t)。因为u*(t)仍是离散的脉冲信号,还需经过保持器,将离散的电压信号变成连续的电压信号。通常保持器是零阶保持器,当采样周期T和量化单位都足够小时,可以将保持器输出的阶梯信号u(t)近似当作连续变化的模拟信号。在实际结构中,D/A转换器与保持器是合成一体的,而在分析计算时常将保持器与控制对象连在一起,合称广义控制对象。
(2)差分方程和脉冲传递函数
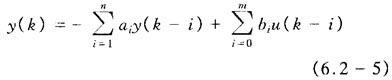
对于采样控制系统,其输出与输入之间用线性常系数差分方程表示
y(k)+a1y(k-1)+…+any(k-n)=b0u(k)+b1u(k-1)+…+bmu(k-m)(6.2-4)
式中n,m-输出和输入的阶次,都是正整数,且n≥m,改写上式为
对式(6.2-5)Z变换后,求零初始条件下线性系统的脉冲传递函数,并整理后得出脉冲传递函数为
式中Y(z),U(z)是y(k),u(k)的Z变换。
当对一个连续的线性系统的输入和输出同时采样时,从连续系统的传递函数G(s)求相应的采样系统的脉冲传递函数G(z),其步骤如下:
·求传递函数G(s)的拉氏反变换
 (6.2-7)
(6.2-7)
h(t)是连续系统的脉冲响应函数,是当系统输入脉冲函数δ(t)时的输出函数。
·对h(t)进行采样,即根据式(6.2-1)求得离散化的h*(t)=h(k)。
·根据Z变换的定义,求得脉冲传递函数

这些步骤简记为
G(z)=Z[G(s)](6.2-9)
也可以在表格中,从G(s)直接查出相应的G(z)。对于图6.2-9所示的由控制对象和保持器组成的串联环节的广义系统其传递函数为
G(s)=Gh(s)Gs(s)
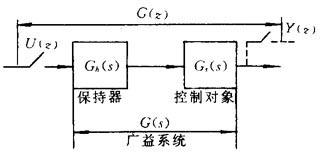
图6.2-9 广义系统的脉冲传递函数
广义的脉冲传递函数为
G(z)=Z[Gh(s)G(s)](6.2-10)
采样开关在系统中的位置对系统的脉冲传递函数有重要影响,本书列举了几种闭环采样系统输出量的变换表达式,可供参考。求闭环系统脉冲传递函数时,应根据系统中串联环节的不同连接形式列写Z变换方程。