智能I/O接口
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册下》第2991页(2565字)
为满足PC更加复杂的控制功能的需要,PC机配有许多智能I/O接口。智能I/O接口模板不同于一般的I/O接口,它带有自身的微处理器、存储器、系统程序。智能接口模板通过系统总线与CPU模板相连,并可在CPU模板协调管理下独立工作,从而可提高处理速度,又便于用户程序的编制。智能I/O接口模板包括带有PID调节的模拟量控制模板、高速计数模板、ASCII输出模板、BASIC模板、数字位置控制模板、伺服编码模板和中断控制模板等。使用智能I/O接口,不仅可使可编程序控制器用于顺序控制,还可用于闭环控制等一些复杂的控制功能。
2.5.1 高速计数模板
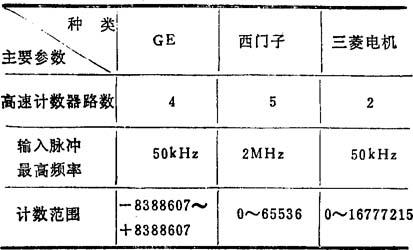
高速计数模板用以监视和控制过程变量,如位置、速度、流量等物理参量。否则,PC就不能正确记录脉冲宽度小于PC扫描周期的快速脉冲个数。图8.6-16所示为GE系列六可编程序控制器的高速计数器模板结构。图中CPU为模板本身的微处理器:存储单元包括模板本身的系统软件存储区和用户程序存储区,有四个独立的计数器,中间寄存器有12个预置寄存器(其中四个用于控制回路实时响应输出,其余八个用于可编程序控制器CPU的顺序控制),输入回路带光电隔离器,输出回路采用集电极开路的晶体管输出。其工作过程是:高速计数器模板中的预置寄存器由可编程序控制器的CPU为其置初值,计数器在外来高速信号作用下计数,并在模板内的微处理器控制下,不断对累加计数值与预置值进行比较,用户可设定比较范围,将比较结果等状态信息经模板输出回路送给PC机的CPU,再由CPU发出预定的控制信号,完成预定的控制过程。高速计数模板与PC机CPU的信息交换,是通过32个输入点和32个输出点进行的。CPU将预置数据和命令传送给高速计数模板,高速计数模板将模板状态、输出状态、累加计数等返回给PC机CPU。每一PC机的每一个扫描周期,均进行相互信息的交换。由于高速计数模板的功能均是对高速变化的信号进行计数,所以各种高速计数模板的结构相同,都由微处理器、高速计数器、内存单元和控制单元组成,而且模板内每一路计数器的输入信号种类和范围都相同。不同之处只是具体的参数,主要是计数器数目、最高输入脉冲的频率和计数范围等。三种高速计数模板的主要参数列于表8.6-5。
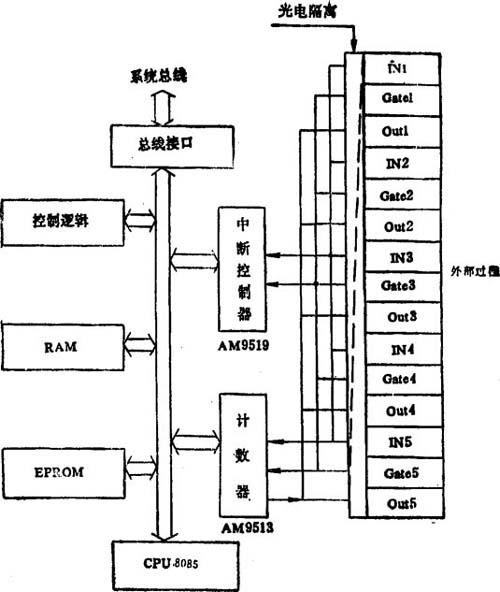
图8.6-16 GE系列六PC的高速计数模板结构框图
表8.6-5 三种高速计数模板主要参数的比较
2,5.2 ASCIJ/BASIC模板
GES 6PC的ASCII/BASIC模板,由带有微处理器8085及其支持电路组成,其功能如图8.6-17所示。其中配置有串行I/O端口PORT1和PORT2,以便与外部设备通讯。串行端口可由用户选择采用RS232C、RS-422或20mA电流环三种不同的电气规范。两个端口既可工作于全双工方式(发送、接收可同时进行),又可工作于半双工方式(发送、接收分时进行)。端口与模板其它电路,采用光电隔离措施。允许连接的外部设备,与模板内部有1500V的电位差。与端口连接的典型设备有打印终端、CRT终端、电传打字机、调制解调器和其它计算机或是另外的ASCII/BASIC模板。两个端口均可与其它设备通讯,而PORT1可用于对该模板进行编程。模板上有32K字节EPROM,存放模板系统程序。系统软件包括GE/BASIC语言服务、通讯服务、自我诊断等几部分。还有16K字节的CMOS RAM,其中4K字节为系统程序使用,12K字节为存放用户程序和数据。RAM以锂电池作后备电源。ASCII/BASIC模板的基本功能有:1.用PORT1进行编程,通讯;2.用PORT2进行通讯;3.与GES6 PC进行通讯;4.执行GE/BASIC程序所规定的功能。
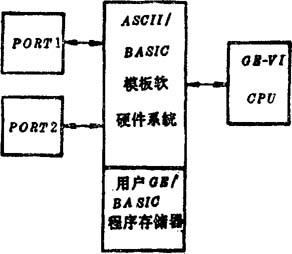
图8.6-17 ASCII/BASIC模板框图
ASCII/BASIC模板有编程和运行两种工作方式.前者,用户通过连接在PORT1上的设备,进行GE/BASIC程序的输入、修改、检查;后者,在运行方式时,该模板执行用户编制的GE/BASIC程序,并可与GES6 PC的CPU和两串行端口的设备进行信息交换。此外,还可不受GES6 PC的控制,独立作为微机系统使用、编制、修改并执行GE/BASIC程序。ASCII/BASIC模板的几种常见用法是:数据处理;复杂的数学运算;生产过程的数据表输出;与此模板相连的外设提供接口;通过显示终端直接操纵GES6 PC;独立于GES6 PC,用于解决其它复杂问题。
2.5.3 闭环控制模板
用可编程序控制器实现闭环控制的方法大致有两大类。一类主要是利用系统的模拟量输入输出的硬件,开发较完善的闭环控制软件功能,实现各种闭环控制方案。另一类是采用硬件、软件共同开发的方法,研制出闭环控制硬件模板,在此基础上开发出适应各种控制方案的软件功能,进而实现闭环控制功能。前一类是完全由软件实现的方法,实际上是依赖于模拟量输入输出模板的硬件资源。后一类方法,是采用这种硬件模板与软件功能相结合的方法。为适应各种需要,开发适用于PC的闭环控制模板,有温度控制、位置控制、通用闭环控制等。有的通用闭环控制模板,在不同的软件功能作用下,可实现P、PI、PD和PID控制,也可实现电机拖动系统的闭环控制,如图8.6-18所示电机拖动闭环控制,可实现逻辑控制和速度控制,加上位置控制环,就能对系统中的被控件的位置作精确定位,从而进行位置控制,如图8.6-19所示。
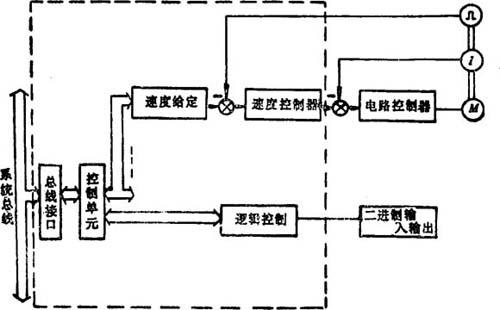
图8.6-18 电机拖动闭环控制框图
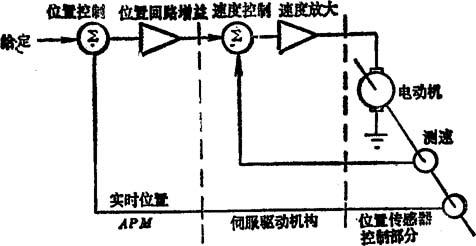
图8.6-19 轴向定位模板的闭环控制示意图