多闭链机构自由度
书籍:现代综合机械设计手册中
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1816页(415字)
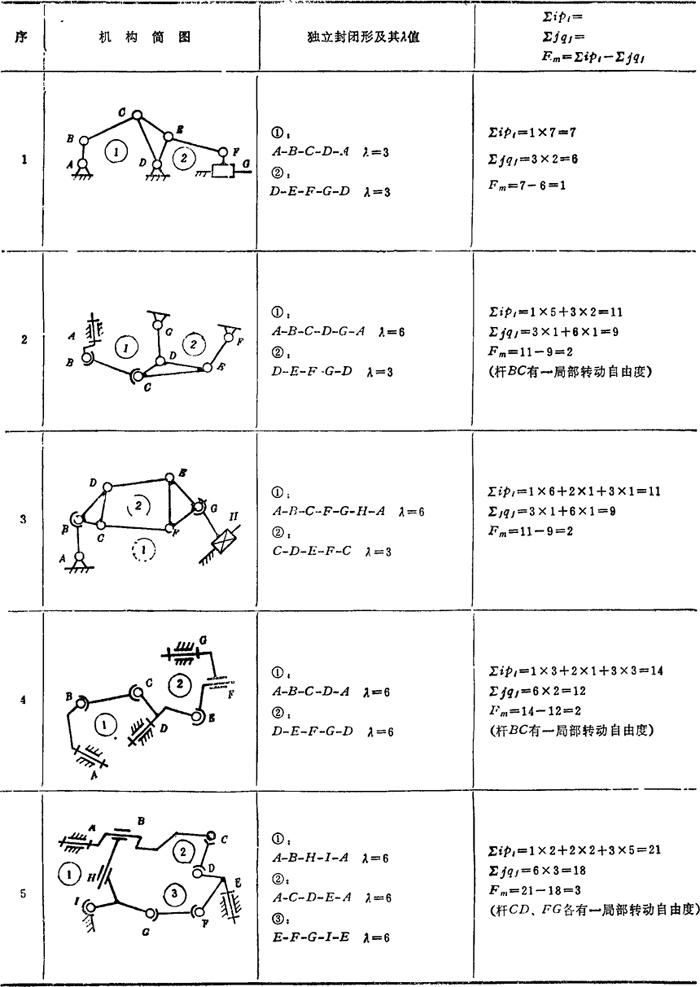
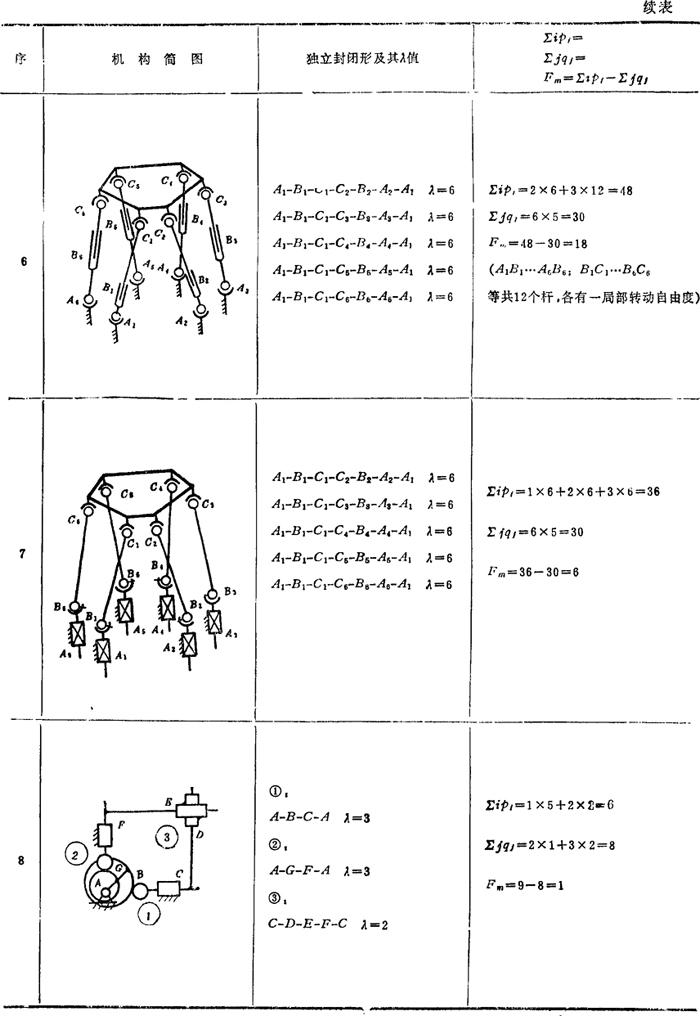
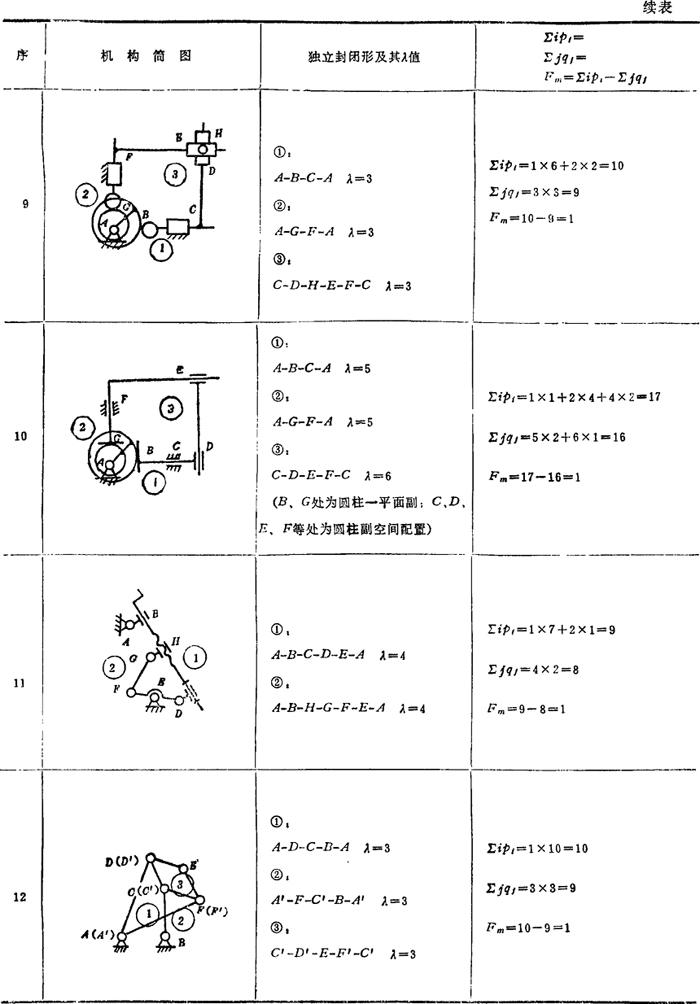
含有2个或更多独立封闭形的闭链机构称多闭链机构(多环机构)。每个独立封闭形至少含有1个未曾在其它封闭形中出现过的运动副。设机构所含闭合约束度λ等于2、3、4、5、6的独立封闭形的数目分别为q2、q3、q4、q5、q6,则一般情况下,多闭链机构自由度Fm等于各个运动副自由度f的总和减去各个独立封闭形闭合约束度λ的总和,即

表5.1-9 多闭链机构自由度Fm计算示例
上一篇:单闭链机构自由度
下一篇:现代综合机械设计手册中目录