三相异步电动机的工作原理及构造
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册下》第2653页(2042字)
1.1.1 工作原理
异步电动机的转动原理如图8.2-1所示。图中1为转子;3为转子上的导体,前后端部相连;2为一对磁极。在磁极顺时针转动时,根据右手定则,导体中产生图示方向的电动势,在闭合的导体中将产生电流。该电流与旋转磁场相互作用,受力方向可根据左手定则确定(见图中F),因而转子受电磁转矩而顺时针旋转。实际三相交流异步电动机中的旋转磁场,是由三相交变电流与三相绕组配合产生的。见图8.2-2,设三相绕组对称分布在电机定子上,A、B、C为三个线圈的始端,X、Y、Z为三线圈的末端。若三个绕组联接成星形,接入三相电源,则三绕组中通过的三相交流电流波形如图8.2-3所示,其相位相互差120°。在此电流作用下,根据波形图中不同的时间t1、t2、t3、t4,可得到图8.2-2中三相绕组对应时刻产生的磁极方向(图中导线截面中心的“点”表示电流向外,“×”表示电流向里)。综合观察各图磁场方向可见,三相交变电流通过三相绕组可形成一个空间旋转磁场。这是绕组在定子中形成一对极的情况。
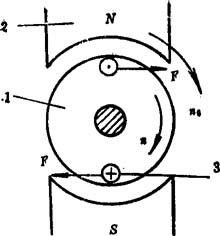
图8.2-1 异步电动机转动原理
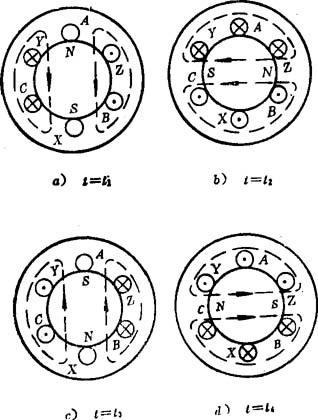
图8.2-2 旋转磁场形成示意图
三相电流为三相绕组配合而产生的旋转磁场的转速为

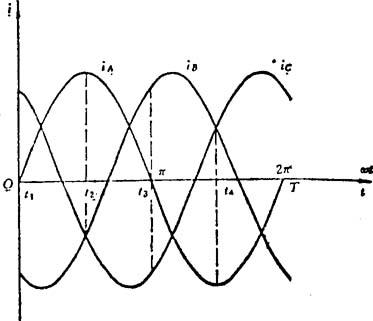
图8.2-3 三相电流的波形图
式中 n0为磁场转速(r/min);f1为频率(HZ);P为磁极对数。
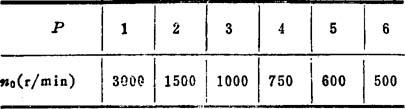
n0通常又可称同步转速。频率为50HZ的不同极对数的同步转速见表8.2-1所示。
表8.2-1 不同极对数与同步转速n0的关系
根据三相交流异步电机的原理,转子转速必定小于旋转磁场转速,才存在磁力线切割导体而形成感应电动势和电流,从而产生电磁转矩而使转子转动。由于转子转速与同步转速不同,故称为异步电动机,又称感应电机。转子转速n与磁场转速n0相差的程度用转差率s表示,即

在电动机起动瞬间,n=0,s=1,s为最大值在额定负载下,s约为1.5%~6%。根据额定负载下的s和同步转速n0,可从下式求得电动机转子额定转速n,即
n=(1-s)n0 (8.2-3)
例如,某三相异步电动机的额定转速为1450r/min,电源频率为50HZ,试求其转差率s时,可先根据表8.2-1查得在接近并略大于额定转速1450r/min的磁场转速为1500r/min,并由此查得该电机为2对极,同时应用式(8.2-2)得

1.1.2 三相异步电动机的构造
三相异步电动机主要由定子和转子两大部分构成。其中,定子又由机座、铁心、三相绕组等组成。机座一般用铸铁或铸钢制成。铁心用周边冲出牙槽的硅钢片叠制而成,固定在机座内。三相绕组安置在铁心槽内。
转子有鼠笼式和绕线式两种结构。其中,鼠笼式转子的本体由周边冲槽的硅钢片叠制而成,外形为圆柱状,铁心槽中插入铜条,两端面利用铜环与各铜条焊接。鼠笼式转子绕组也有用浇铸式压铸铝液的方法连同电机风扇一同制出。鼠笼转子的结构简单,应用广泛。绕线式转子的铁心也由周边冲槽的硅钢片叠制成圆柱形状,槽中放置绝缘导线三相绕组,联接成星形,三个端点分别接在转子轴上的三个铜制滑环上,再用碳刷与三组可调电阻联接。由于绕线式异步电动机的结构较复杂,故应用不如鼠笼式广泛。
三相异步电动机定子三相绕组的六根出线端,引出在电机接线盒中。如图8.2-4所示,六个引出端点一般标有D1、D2、D3、D4、D5、D6符号,其中D1、D4为第一相绕组两端点,D2、D5为第二相绕组两端点,D3、D6为第三相绕组两端点。若D1、D2、D3为三相绕组首端,则D4、D5、D6为尾端。如图a)所示,将D1、D2、D3相联,D4、D5、D6接三相电源,则为Y形接法运行。图b)所示是D1、D6相接,D2、D4相接,D3、D5相接,即各绕组的首尾相接,再与三相电源相连,形成△形接法运行。
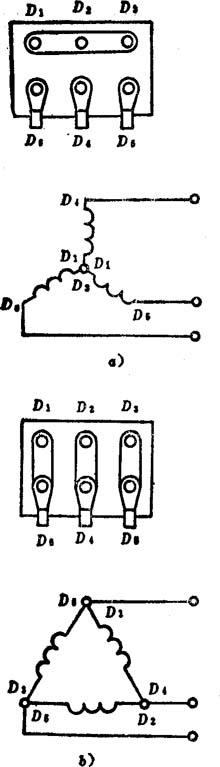
图8.2-4 三相异步电动机的接线