矢量方程图解法
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1889页(2943字)
矢量方程图解法:按照相对运动原理列出的速度、、加速度矢量方程,用一定比例尺画出位置图、速度图、加速度图,从图中测量出相应的线段,求出速度、加速度。
以上式中vA为A点速度(m/s);pa为在速度图中表示vA的线段长度(mm);aA为A点加速度(m/s2);πa′为在加速度图中表示aA的线段长度(mm)。
设已知机构的各杆长度、主动件位置(φ1)、主动件角速度ω1=常数。
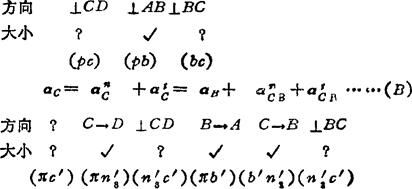
例5.3-9 曲柄滑块机构。其矢量方程:
vc= vB+ vcB……(A)


作法:
①选取μ1,画出位置图a)。
②取vB=lABω1,方向⊥AB,指向同ω1一致
③ 取 ,由(A)式画出速度图b)。
,由(A)式画出速度图b)。
④ ;
; ;
; ,单位为rad/s;各速度方向见图。
,单位为rad/s;各速度方向见图。
⑤ ,方向∥AB、B→A;
,方向∥AB、B→A; =
= ,方向∥BC、C→B。
,方向∥BC、C→B。
⑥ 取μa; ;
; ;由(B)式画出加速度图c)。
;由(B)式画出加速度图c)。
⑦ ac=πс′μa; ;
; ,单位为rad/s2;各加速度方向见图。
,单位为rad/s2;各加速度方向见图。
说明:由同一构件的两点列矢量方程,是矢量方程图解法的基本原理之一;本例选构件2的B、C两点列矢量方程,是基于B点是速度、加速度已知的点,而C点是速度方向线、加速度方向线已知的点。
例5.3-10 正切机构。其矢量方程:

作法:
①选取μ1,画出位置图a)。
②vB1=ABμ1ω1, 方向⊥AB,指向同ω1一致。
③ 取 ;
; ;由(A)式画出速度图b)。
;由(A)式画出速度图b)。
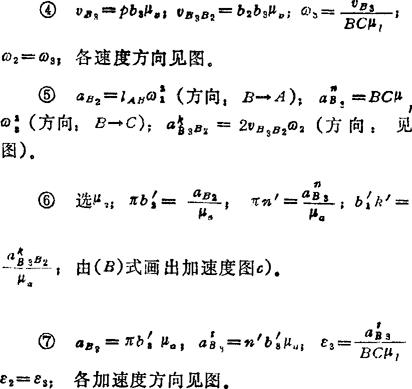
④ vB2=pb2×μv; ;
; ;ω2=ω1;各速度方向见图。
;ω2=ω1;各速度方向见图。
⑤ ,方向B→A;
,方向B→A; =2vB2B1ω1,指向由vB2B1按ω1方向转90°定,选μa;
=2vB2B1ω1,指向由vB2B1按ω1方向转90°定,选μa; ;
; ;由(B)式画出加速度图c)。
;由(B)式画出加速度图c)。
⑥ ;aB3=aB2;ε2=ε1=0;各加速度方向见图。
;aB3=aB2;ε2=ε1=0;各加速度方向见图。
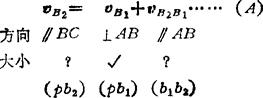
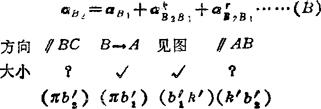
说明:当机构中含有组成移动副的两个活动构件时,由这两个构件的重合点列矢量方程,是矢量万程图解法基本原理之二;本例选构件1、2的重合点B1、B2列矢量方程,是基于B1点是速度,加速度已知的点,而B2点是速度方向线、加速度方向线已知的点。
例5.3-11 摆动导杆机构。其矢量方程:
 …………………………(A)
…………………………(A)


作法:
①选取μ1;画出位置图a)。
②vB1=lABω1,方向上AB,指向同ω1一致;
③ 取μv; ;由(A)式画出速度图b)。
;由(A)式画出速度图b)。
说明:构件2、3组成移动副,选重合点(B2、B3)列方程,是由于B2点是速度、加速度均已知的点;B3点:vB3的方向线已知 。即
。即 ,其方向线已知。
,其方向线已知。
例5.3-12 铰链四杆机构。其矢量方程:


作法:
①选取μ1;画出位置图a)。
②vB=lABω1;方向上AB、指向同ω1一致。
③ 取 ;
; ;由(A)式画速度图b)。
;由(A)式画速度图b)。


说明:本例选构件2的B、C两点列方程,是由于B点的vB、aB均已知,C点的vC方向线已知,aC方向线已知。
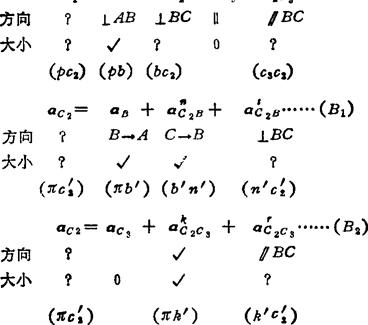
例5.3-13 曲柄摇块机构。其矢量方程:

vC,=vB+vC2B=vC3+vC2c3……(A)
作法:
①选取μ1,画出位置图a)。
②vB=1ABω1,方向⊥AB,指向同ω1一致。
③ 取μ。; ;由(A)式画出速度图b)。
;由(A)式画出速度图b)。

例5.3-14 四杆机构。其矢量方程:



作法:
①选取μ1,画出位置图a)。
②vC1=ACμ1ω1,方向上AC,指向同ω1一致。
③ 取 ;
; :由(A)式画出速度图b)。
:由(A)式画出速度图b)。

说明:将构件1扩大至包含构件2上的C点是由于:ac1和ac1,已知,vc2和aC2的方向线已知。