空间连杆机构
书籍:现代综合机械设计手册中
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1941页(362字)
应用空间连杆机构,可使从动杆得到预定的位置、行程或某种运动规律,也可使连杆上某点获得预定的运动轨迹。空间四杆机构如图5.5-1所示,由若干构件以运动副相连接组成。机构中各构件是在三维空间中运动。
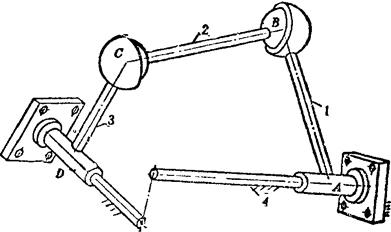
图5.5-1 空间四杆机构
研究设计空间连杆机构的方法,有以画法几何为基础的图解法和以向量或矩阵等数学工具为基础的解析法。图解法比较直观,但作图误差大,对于复杂的空间连杆机构的图解也十分困难,所以仅用于较简单的空间连杆机构.解析法是根据机构中各构件间的运动关系,运用不同的数学方法和工具列出数学方程式,然后进行求解,因而解算的工作量大、繁琐,一般需由电子计算机配合进行研究设计。
上一篇:凸轮机构的压力角
下一篇:凸轮廓线的最小曲率半径