手的构造与功能
书籍:现代综合机械设计手册上
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册上》第854页(549字)
手是由肌肉、肌腱、韧带、骨髂、动脉及感觉灵敏的神经纤维组合而成的,如图3.7一1所示,用手抓握工具时,运用了由肩至指尖的全部肌肉、关节和肌腱。
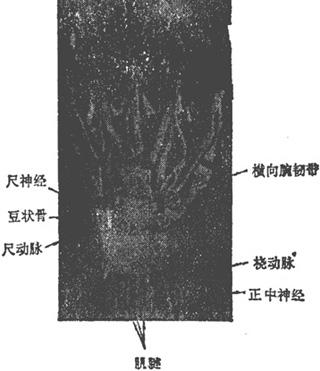
图3.7-1 人体手部的掌侧结构
手指的动作由肌腱控制。手指能够弯曲,是靠前臂肌肉的作用,这些肌肉跨越腕关节通道的长肌腱连向手指。腕关节使手指能作两轴面的动作,其中一轴面的动作为掌侧屈和背侧屈,如图3.7-2a)所示;另一轴面的动作则为尺侧偏和桡侧偏,如图b)所示。
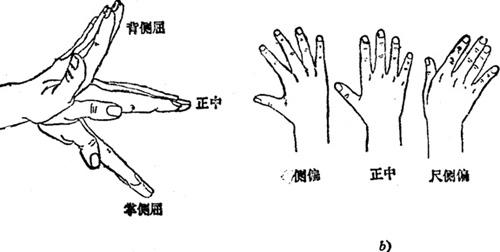
图3.7-2 腕关节的动作
前臂的尺骨与桡骨和上臂的肱骨相连接,如图3.7-3所示,肱二头肌连向桡骨,当手臂伸展时,肱二头肌以肱骨为倚靠强力拉引桡骨,该伸张力会使肘关节产生磨擦而生热,肘二头肌是前臂的屈肌,亦是手腕的外转肌,从而在手臂弯曲,使肘部成90°并向外转动时,肱二头肌便收缩突起。因此,凡需用手作强力拉引并同时向内旋转的动作。均应尽量避免。
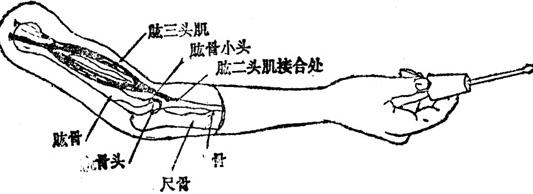
图3.7-3 肱二头肌连向于桡骨的情形
上一篇:考虑切削件机械加工工艺的合理设计
下一篇:现代综合机械设计手册上目录