电液速度控制系统
出处:按学科分类—工业技术 北京理工大学出版社《新编液压工程手册下册》第2062页(2610字)
电液速度控制系统广泛应用在发电机组、机床、雷达天线、转台、炮塔等装备的速度控制。这些系统的输出量是速度,速度控制就是把输出的速度经速度传感器反馈给输入,形成一个速度控制系统。
局部的速度反馈作为一个辅助回路出现在位置回路中,可以提高系统的刚度,减小主回路的某些参数变化的影响,改善了系统的性能。这在电液位置控制系统中也是常见的。
(1)电液速度控制系统的组成及控制方式
速度控制系统的组成及控制有多种方式,在小功率控制时采用阀-马达组合的控制方式;大功率的控制系统采用变量泵和液压马达的组合方式。
A.伺服阀控制液压马达
由电液伺服阀、液压马达、积分放大器、速度传感器等组成的速度控制系统的原理图如图34.2-20所示。

国34.2-20 阀控马达电液速度控制系统
B.变量泵-定量马达开环控制
如图34.2-21所示。由变量泵的变量伺服控制机构构成位置控制系统进行控制。变量机构由控制轴向柱塞泵斜盘倾角的伺服阀、液压缸、比例放大器、位移传感器组成。这种控制方式是改变变量泵的斜盘倾角来控制供给液压马达的流量,以此来调节定量液压马达的转速。由于是开环速度控制,所以受负载和温度等因素变化的影响,不能获得准确的速度控制,适合于负载压力相对恒定的系统。
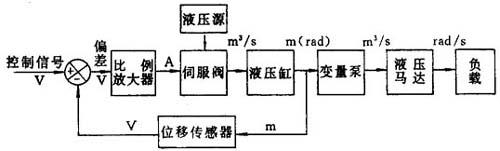
图34.2-21 变量泵控制定量马达开环控制系统
C.变量泵-定量马达闭环控制
如图34.2-22所示,控制方式是在开环控制的基础上,增加了速度传感器,将液压马达转速进行反馈,构成闭环控制。速度反馈信号与指令信号的差值经积分放大器加到变量伺服机构的输入端,使泵的流量向着减小速度误差的方向变化。采用积分放大器是使开环系统具有积分特性,构成Ⅰ型伺服系统。由于变量伺服机构的惯量很小,液压缸-负载的谐振频率很高,可看成积分环节,整个系统的动态特性由变量泵-定量马达部分决定。

图34.2-22 变量泵控制定量马达闭环控制系统
D.无变量缸位置反馈的变量泵-液压马达闭环控制
如图34.2-23所示。图中去消位置反馈回路,只保留液压马达速度信号的反馈回路。由于液压缸的积分作用,系统中已包含一个积分环节,所以放大器采用比例放大器,系统仍是Ⅰ型系统,系统的结构比图34.2-22简单,但是伺服阀控缸环节少了一个位置闭环成为开环,这一局部开环的精度比闭环的精度低,加上开环刚度低,所以变量泵的变量控制力矩变动时会引起误差。
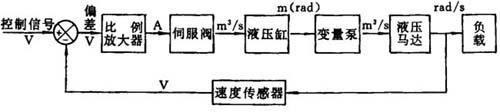
图34.2-23 无变量缸位置反馈的泵控马达速度闭环控制系统
(2)速度控制系统的分析与校正
A.速度控制系统的分析
以图34.2-23的阀控马达为例进行分析,系统的负载是惯性负载,伺服阀略去其动态,认为是一个比例环节,该系统的方框图见图34.2-24。

图34.2-24 速度控制系统方块图
系统的开环传递函数为

式中 K0为速度控制系统开环增益
K0=KaKsvKqKf/Dm
这是一个零型系统,对速度阶跃输入时,速度偏差随速度增大而增大,这是一个有差系统,因此实际上是一个速度调节器。开环波德图如图34.2-25所示。
曲线以-40dB/dec穿过零分贝线,所以穿越频率处相位裕量很小,如果系统不作简化,考虑到ωh和ωc之间有其它滞后环节,穿越频率ωc之处的斜率将是60dB/dec或80dB/dec,系统的相位滞后又将增加90°或180°,系统肯定是不稳定,即使勉强稳定,由于K0的下降,系统的精度下降。因此速度控制必须校正,才能可靠稳定地工作。

图34.2-25 速度控制系统开环波德图
B.速度控制系统的校正
最简单的校正方法是在伺服阀前面的回路电子部分加上串联滞后校正网络,相当于低频段增加了惯性环节。这时穿越频率附近的斜率为-20dB/dec。图34.2-26是低频区增加一个时间常数T=RC滞后校正环节的系统波德图。其开环传递函数为

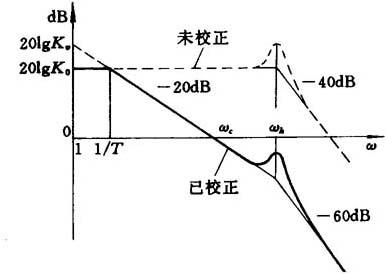
图34.2-26 有串联滞后校正的速度控制系统波德图
由于ζh一般为0.1~0.2,从稳定条件出发Kv≈ωc≈(0.1~0.2)ωb。设计校正网络就是要确定K0及T,由图34.2-26的几何关系得
lgωc-lg(1/T)=lgK0
即 K0=Tωc (34.2-47)
滞后网络的时间常数为
确定ωc后选K0及T再确定R及C。
经过校正的系统穿越频率比未校正的系统的穿越频率低,使闭环响应速度变慢。