电液控制系统的结构组成
出处:按学科分类—工业技术 北京理工大学出版社《新编液压工程手册下册》第2050页(1873字)
图34.1-1为一个双电位器位置控制电液控制系统。该系统由指令电位器、电放大器、电液伺服阀、液压缸、工作台(被控制对象)、反馈电位器组成。移动指令电位器的滑臂,滑臂位置换成电压ug,这个电压同反映工作台位置的反馈电位器的反馈电压uf相比较,得到误差电压△u,误差电压经电放大器放大后,变为电流信号控制电液伺服阀,使它输出流量,由液压缸推动工作台,移动反馈电位器滑臂,使输出电压uf与ug相比的误差电压△u=0,伺服阀恢复零点不输出流量,液压缸活塞停止。如果指令电位器滑臂位置不断变化,工作台位置也不断变化。图34.1-2是转台电液控制系统,与图34.1-1中系统不同的是被控对象是转台。电液伺服阀输出流量控制液压马达转速,通过减速器带动转台运动,马达转速由测速发电机测得并转换成电压与输入电压比较得到的误差电压,经放大后转换成电流,控制伺服阀的输出流量大小及方向,从而控制马达的转向及方向。
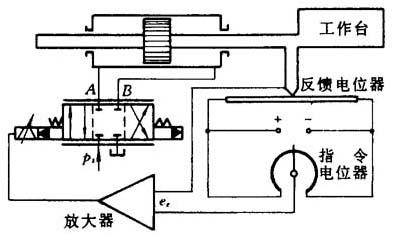
图34.1-1 双电位器位置控制电液控制系统

图34.1-2 转台电液速度控制系统
两个系统控制对象不同,机械结构也有差异,但系统中被控制量(工作台位置、马达转速)都是由传感器(反馈电位器、测速发电机)进行检测,并把测得的输出信号引回输入端,与指令控制信号进行比较,也就是反馈,用比较后的误差信号来进行控制,以便消除误差。因为系统中有反馈元件(电位器、测速发电机),这是一个典型的闭环控制系统,具有反馈系统的所有特点。我们所研究的电液控制系统就是反馈控制系统。无论多么复杂的反馈系统,它都是由一些基本元件组成的,见图34.1-3。

图34.1-3 液压控制系统的基本元件
1-指令元件;2-反馈元件;3-比较元件;4-放大变换元件;5-执行元件;6-被控对象
反馈控制系统的基本元件有:
指令元件 是产生与反馈信号同样形式和因次的控制信号。如图34.1-1中的指令电位器和图34.1-2的电位器,也可以是其它电器或计算机;
反馈元件 检测被控制量,给出反馈信号,如上二图中的反馈电位器及测速发电机;
比较元件 产生控制信号和反馈信号比较后的误差信号,如图34.1-1中的电位器电桥或是放大器的电路中的比较电路;
放大变换元件 把控制信号和反馈信号比较所得的误差信号放大转换(电-液、机-液)成液压信号(流量、压力),常包括电放大器,电液伺服阀等;
执行元件 直接对被控对象进行控制的元件,如液压马达,液压缸;
被控对象 是控制系统进行控制的对象,它的输出量就是系统的被控制量,如图中的工作台、转台。在电液控制系统中,指令元件、反馈元件、比较元件经常组合在一起,称为误差(或偏差)检测器。
概括起来,电液控制系统是由误差检测器、放大转换元件、执行元件及被控制对象组成。
除此而外,为了改善电液控制系统的性能,还可能有校正装置及局部反馈装置以及不包括在控制回路内的液压能源和其他辅助装置。
以上我们按组成元件的功能来研究系统的构成,这些组成元件的功能可以用不同方法来实现。功能元件不同于结构元件,同一个结构元件可以完成几种功能,也可能几个结构元件组合完成一个功能。
随着计算机技术的发展,利用计算机在电液控制系统中进行闭合,实现校正、变增益、变带宽以及工作状态转换及补偿,使计算机成为整个系统中的一个环节。由于计算机控制的软件功能很多,实现多变量和各种控制方法是很方便的,易于完成环节外处理和环节内的补偿。因此,在电液控制系统中,计算机作为一个环节已是当前的发展主流。数字控制器的设计在6.2节中已有叙述,其系统的设计方法和性能分析与一般控制系统的方法雷同,本章将不再作专门说明。