自动调平系统
出处:按学科分类—工业技术 北京理工大学出版社《新编液压工程手册下册》第2457页(1762字)
(1)系统功能
液压调平系统用于火炮上,是使火炮由行军状态转入战斗状态,并使火炮处于水平状态,其目的是提高火炮随动系统的跟踪精度和提高射击命中率。
液压调平系统若用于火控车辆上,当火控车辆进入阵地转入战斗状态时,使其车辆处于水平的稳定在工作位置上。
这两种用场的调平系统均为三点调平,系统工作原理和组成,基本相同,所以后文以火炮调平为例。
(2)系统组成
·液体气泡水准仪,它作为系统的检测器件安装于炮车上,此水准仪又称电子水准仪。
·电源供电给电子放大器和电子水准仪。
·电子放大器组合,用于放大电子水准仪测量的水平状态信号,它分为横轴和纵轴两个通道,控制触发器和继电器,接通电磁阀的电路,控制电磁阀的动作。
·快慢控制阀和液压锁,用以控制液体流向起重缸的流量,从而控制该缸活塞升降速度。
·起重缸用来支承全炮重量和调平时的起落(升降炮车)。内部有一个拉簧,以防止行军状态时,炮车冲击使其活塞下落。
·液压站为系统(包括电动和手动)供油。
(3)动作原理(见图47.1-4)
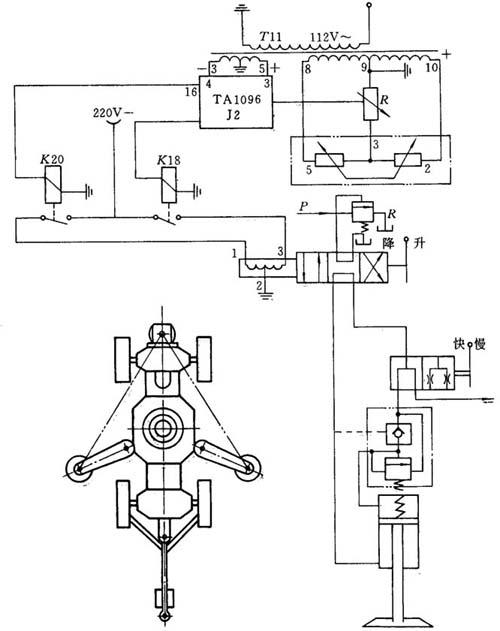
图47.1-4 调平系统原理图
由图47.1-4可知,该系统类似于误差控制的位置系统,但实际上又属于开关型(非线性)控制系统。当火炮调平后系统停止工作,火炮在射击过程中,系统处于闭锁状态。炮车由三个起重缸支承,前臂缸为调平基准,后臂左右两个缸分别负责纵向和横向调平。
水准仪中装有导电的液体和汽泡,依据对水平状态时的角偏离值,液体与气泡相应地流动,以改变节点3-2和3-5之间的电阻值。当炮车处于水平状态时,两节点间的电阻值相等。水准仪的这两个电阻与电源变压器T11的8-9-10的两个绕阻构成了电桥。当火炮不水平时,电桥破坏平衡,而有电流通过电阻R。R输出端的电压是基准值与实际值的差(它提供两个控制量,其一是振幅,它反映误差大小。其二是相对于基准电压的相位差,它决定了控制的方向)。该电压进入电子放大器TA1096(J2),经过放大和相敏整流,然后使两个触发器之一翻转,继电器K18或K20吸合(一个对应炮车下落,一个对应炮车上升)。继电器接通相对应的电磁铁KM2的某侧电路,电磁阀打开左或右边的油路,途径快慢控制阀到达液压缸某一腔,使火炮上或下移动直到趋于水平,水准仪的检查误差逐渐减小直到门限值(规定死区),电桥逐渐趋于平衡,调平结束。
(4)调平的物理过程
由系统的组成可知,系统中存在许多惯性滞后器件如继电器、电磁铁,滑阀的液动阻力,油的惯量等都是延时环节。当调平自动进行时,必须适当控制通向起重缸的流量,否则将造成系统的振荡,因此在通往起重缸的回路中设置了孔径为0.6mm的节流器即慢动阀,当系统快速调平趋近水平时,将快慢控制阀置于慢动位移,系统方能稳定在水平上(见图47.1-5)。

图47.1-5 调平过程示波图
这类系统不是通常的连续控制而是开关型控制,要建立数学模型,用描述函数来分析。此处给出一个稳定调平的关系式。
T0≥τ
T0——对应水准仪死区液压缸活塞走过的时间
τ——系统中所有滞后环节的总时间常数