空间RSCS四杆机构
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1948页(956字)
在图5.5-15中,图a)所示为空间RSCS机构,图b)是用于飞机起落架上的示意图。当作为圆柱副的液压缸3通油时,与机轮相连的摇杆1即作摆动,从而实现起落架的收放。由图可以看出,RSCS机构中含两个局部自由度,柱塞2及液压缸3均可绕自身轴线转动,但并不影响摇杆1的运动。对RSCS机构进行运动分析,主要是求解杆2、3之间的相对伸缩量与摇杆1的转角关系。由于杆2、3为同一轴线,其间的相对伸缩量与B、C两球面副中心距3的变量相同。这样,在液压缸作为主动件时,s即可作为已知运动参数。
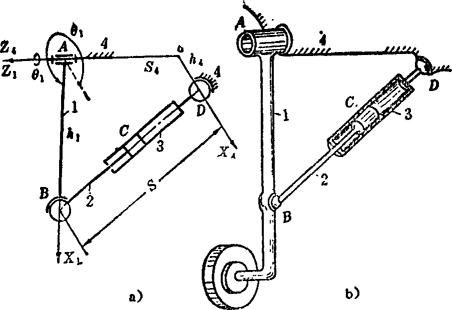
图5.5-15 空间RSCS机构
建立坐标系时,在机架4及摇杆1分别固结有坐标系a-X4(Y4)Z4和A-X1(Y1)Z1。Z1轴选定和Z4轴相重合,并沿着转动轴线。自球面副中心B、D所作Z1(Z4)轴的垂线,分别取为X1轴和X4轴。这样,机构的常量参数有:h1=AB,h4=aD,s4=aA;而主要运动参数除s外,还有摇杆1的转角θ1。对着Z4轴观察,绕Z4轴,自X4轴逆时针方向量至X1轴时θ1为正,反之为负。
由于图中坐标系a-X4(Y4)Z4和A-X1(Y1)Z1的关系与图5.5-11相同,故按式(5.5-1)和(5.5-2)得到球面副中心B点在坐标系a-X4(Y4)Z4中的时变坐标为〔h1cosθ1,h1sinθ1,s4〕T,球面副中心D点在a-X4(Y4)Z4中的坐标为〔h4,0,0〕T。
采用拆杆法分析时,应将杆2、3一并拆离。这样,两球面副中心B、D两点间的距离应和s相等,因而可建立下列几何等同关系式:

由此可得按已知s求解转角θ1的公式为:

将式(5.5-16)对时间求导一次和二次,并注意到液压缸等速进油时 ,可得柱塞等速伸缩时从动摇杆的角速度和角加速度公式:
,可得柱塞等速伸缩时从动摇杆的角速度和角加速度公式: