按主动杆和从动杆三组对应位置设计
出处:按学科分类—工业技术 北京出版社《现代综合机械设计手册中》第1949页(1114字)
如前所述,RSSR四杆机构可供设计的尺度参数有七个。因此,按主动杆和从动杆三组对应位置进行机构设计时,应预先选定四个参数,再按设计要求计算出其余三个参数。预先选定的参数,除通常令夹角a4=90°外,还可有h1、h4、s3;h1、h4、s4;h4、s3、s4;h1、h3、s3或h1、h3、s4等。预选参数不同,设计方程式的形式也不同。若以预定a4(=90°)、h1、h4、s3参数而求h3、54及l,则可按照预定参数并以(θ1)j=φj及(θ3)j=ψj代入式(5.5-3),得到下列设计方程式:

式中未知量为:

将主动杆和从动杆的三组对应角度φj、ψj(i=1,2,3)分别代入式(5.5-20)可得三个线性方程式,由此解出R1、R2、R3后,再利用式(5.5-21)即可解得待设计的参数h3、s4及l。
例5.5-2 按主动杆与从动杆三组对应位置设计RSSR四杆机构。已知主动杆的三个位置转角为φ1=47°、φ2=75°、φ3=108°;从动杆的三个相应位置转角为ψ1=307°、ψ2=279°、ψ3=233°。给定四个参数为:a4=90°、h1=1、h4=-2、s3=1.5。
解:将三组角度φj、ψj(i=1,2,3)分别代入式(5.5-20)得下列三个线性方程式:
-0.79319R1-0.79863R2+R3=2.46103
-0.27238R1-0.98769R2+R2=1.96653
1.38960R1-0.79863R2+R3=0.80855
联立解方程组,得R1=-0.75705,R2=0.53010。R3=2.28390。
利用式(5.5-21)可求出以下机构参数:h3=0.75705;s4=0.70022;l=1.93536
改变h1的数值,则其它所有长度参数均按同一比例随之改变。
图5.5-16所示为所设计机构的两面投影图。
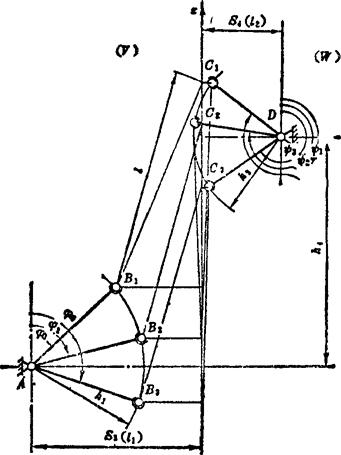
图5.5-16 机构的两面投影图